The DASD and
Evolution of Storage Devices
Rule
1: “Data processing requires data
storage”. – I just made that up.
Data
were originally stored on paper media; first as written documents but fairly
soon
(Hollerith, late 19th century) the storage medium was
machine–readable.
In
the 1950’s, New York Life Insurance Company was devoting an entire floor of its
main building to the storage of punched cards.
Something had to change.
IBM
quickly came out with two magnetic media for storing data:
the magnetic tape
the DASD (disk)
The
acronym “DASD” stands for Direct Access Storage Device.
Until
recently, the standard disk drive was the only commercially viable example.
(Magnetic drum memories became obsolete in the late 1950’s.)
We
now have another very popular example, these USB “flash drives”. While
different from standard disk drives, these are managed as if they were disk
drives and are considered disk drives.
Removable
Disk Packs and Sealed Drives
Early
disk systems mimicked the magnetic tape strategy.
The
disks were organized into packs. These
were mounted into the disk drive,
and removed when another pack was to be used.
Here is an IBM–2311 system.
Disk
Platters
Here
is a picture showing the disk platters on a commercial hard drive,
in which the disk pack was removable from the disk drive.
The Sealed
Disk Pack
The
IBM 3340, code named “Winchester” (because it called for two 30 MB removable
disk packs) was the first to be based on sealed disk packs.
The
sealed disk packs included the head and arm assembly. Packaging these with the
disk pack and not the drive lead to significant cost savings and increased
reliability.

The
Independent Disk Pack & Drive
The
next evolutionary step was inclusion of the disk drive motor and all associated
electronics in the disk pack. Now the
entire unit was removable.
Historical
Cost Data for Disk Drives
|
YEAR |
MANUFACTURER |
COST/GB |
|
1956 |
IBM |
$10,00,000 |
|
1980 |
North Star |
$193,000 |
|
1981 |
Morrow Designs |
$138,000 |
|
1983 |
Davong |
$119,000 |
|
1984 |
Pegasus (Great Lakes) |
$80,000 |
|
1985 |
First Class Peripherals |
$71,000 |
|
1987 |
Iomega |
$45,000 |
|
1988 |
IBM |
$16,000 |
|
1990 |
First Class Peripherals |
$12,000 |
|
1991 |
WD |
$9,000 |
|
1992 |
Iomega |
$7,000 |
|
1994 |
Iomega |
$2000 |
|
1995 |
Seagate |
$850 |
|
1996 |
Maxtor |
$259 |
|
1997 |
Maxtor |
$93 |
|
1998 |
Quantum |
$43 |
|
1999 |
Fujitsu IDE |
$16 |
|
2000 |
Maxtor 7200rpm UDMA/66 |
$9.58 |
|
2001 |
Maxtor 5400 rpm IDE |
$4.57 |
|
2002 |
Western Digital 7200 rpm |
$2.68 |
|
2003 |
Maxtor 7200 rpm IDE |
$1.39 |
|
2004 |
Western Digital Caviar SE |
$1.15 |
|
2011 |
WD Caviar Green (3 TB for $140) |
$0.05 |
Structure of
a Large Disk Drive
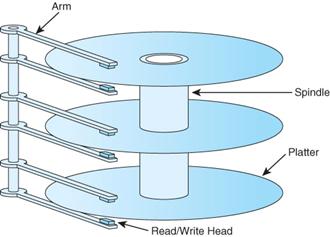
The
typical large–capacity (and physically small) disk drive has a number of glass
platters with magnetic coating. These
spin at a high rate (7,200 rpm or 120 / second)
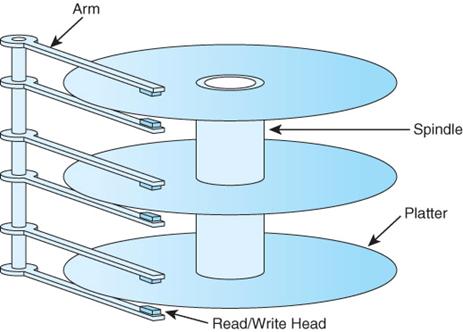
This
drawing shows a disk with three platters and six surfaces. In general, a disk
drive with N platters will have 2·N surfaces, the top and bottom of each platter.
On
early disk drives, before the introduction of sealed drives, the top and bottom
surfaces would not be used because they would become dirty.
Picture of a
Disk Read/Write Arm
Here
is a picture of a commercial disk, showing the read–write arm.
This
drive seems to have two platters, with four recording surfaces.
More on Disk
Drive Structure
Each
surface is divided into a number of concentric tracks.
Each
track has a number of sectors.
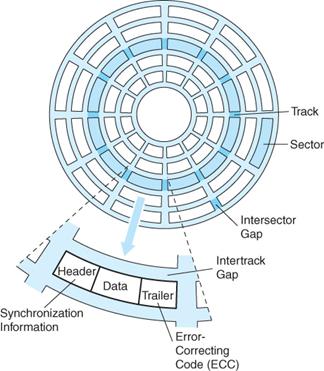
A
sector usually contains 512 bytes of data, along with a header and trailer
part.
Seek Time
and Rotational Latency
In
order to read from a disk track, the read/write heads must be moved to the
track.
This
is a mechanical action, as the read/write heads are physical devices.
There
are two seek times typically quoted for a disk.
Track–to–track: the time to move the heads to the next track
over
Average: the average time to move the
heads to any track.
The
rotational delay is due to the fact
that the disk is spinning at a fixed high speed.
It takes a certain time for a specific sector to rotate under the read/write
heads.
Suppose
a disk rotating at 12,000 RPM. That is
200 revolutions per second.
Each sector moves under the read/write heads 200 times a second,
once every 0.005 second or every 5 milliseconds.
The
rotational latency, or average
rotational delay, is one half of the time for a
complete revolution of the disk. Here it
would be 2.50 milliseconds.
The Idea of
a Cylinder
Fixed head disks have one head per track. The last time I heard of such a device
was 1977, when working with a 1 MB fixed head disk on a PDP–11/45.
I
claim that fixed head disks are obsolete.
Revisit the picture of a typical disk.
Question:
How many tracks can be read before the read/write heads must be moved?
Answer:
One track per surface can be read without moving the heads. Here it is 6.
Definition: A cylinder
is that set of tracks that can be read without moving the disk
read
write heads. A disk has as many
cylinders as a surface has tracks.
A
cylinder has as many tracks as the disk has surfaces.
The File
Allocation Table
Physically the disk contains a large number of
sectors, each of which
contains either data or programs. The
term “cluster” will be defined in the next slide.
Logically the disk contains a large number of files,
also program and data.
The disk will have one or more index structures that
associate files with their sectors.
The two important structures are
the
disk directory associates
a file with its first sector
the
File Allocation Table maintains the
“linked list” of sectors for that file.
An example from the textbook shows the structure of
the FAT.

Here the disk directory indicates that the first
sector for a file is at address 121.
The FAT entry at 121 indicates that the next sector is
at address 124.
The FAT entry at 126 indicates that the next sector is
at address 122.
The FAT entry at 122 indicates that sector 122 is the
last for this file. Sector 125 is bad.
FAT–16 and
Its Consequences
The FAT–16 system was implemented by Microsoft for
early versions of MS–DOS.
This system used a 16–bit index into the FAT.
As there is one FAT entry per sector, this makes this
limits the sector count to 216.
The maximum disk size is thus 216· 512 = 216· 29 = 225 = 25· 220 = 32 MB.
In 1987, my brand–new PC/XT had a 20MB disk! FAT–16 worked very well.
What about a 40 MB disk? How about a 256 MB disk?
Few people in the late 1980’s contemplated disk drives
with capacities of over 100 GB,
but it was obvious that unmodified FAT–16 would not do the job.
We consider two short–term remedies to this problem,
one transient and
one with longer term consequences.
FAT–16 and
Its Consequences
Part 2: Disk Partitioning
The first solution was to partition a larger physical
disk drive
into two logical disk drives.
A 40 MB disk drive would support two logical disks,
each with its own
directory structure and File Allocation Table.
Drive C with capacity of 32 MB
Drive D with capacity of 8 MB.
As a short–term fix, this worked well. However, it just raised the limit to 64 MB.
This solution was obsolete by about 1992.
FAT–16 and
Its Consequences
Part 3: Disk Clusters
The main problem with the FAT–16 system arose from the
fact that each sector was
individually addressable. With 216
addresses available, we have a maximum
of 216 sectors or 32 MB.
The second solution was to remove the restriction that
each sector be addressable.
Sectors were grouped into clusters, and only clusters
could be addressed.
The number of sectors a cluster contained was
constrained to be a power of 2;
so we had 2, 4, 8, 16, etc. sectors per cluster. The effect on disk size is easy to see.
|
Sectors in Cluster |
1 |
2 |
4 |
8 |
16 |
32 |
64 |
|
Bytes in Cluster |
512 |
1024 |
2048 |
4096 |
8192 |
16384 |
32768 |
|
Disk Size |
32 MB |
64 MB |
128 MB |
256 MB |
512 MB |
1 GB |
2 GB |
In
the early 1990’s, it seemed that this solution would work for a while.
Nobody back then envisioned multi–gigabyte disk drives
on personal computers.
There
is a problem associated with large clusters; it is called “internal fragmentation”.
FAT–16 and
Its Consequences
Part 4: Internal Fragmentation
This problem arises from the fact that files must
occupy an integer number of clusters.
Consider a data file having exactly 6,000 bytes of
data, with several cluster sizes.
|
Sectors in Cluster |
1 |
2 |
4 |
8 |
16 |
32 |
64 |
|
Bytes in Cluster |
512 |
1024 |
2048 |
4096 |
8192 |
16384 |
32768 |
|
Clusters needed |
12 |
6 |
3 |
2 |
1 |
1 |
1 |
|
File size on disk |
6144 |
6144 |
6144 |
8192 |
8192 |
16384 |
32768 |
|
Disk efficiency |
97.7% |
97.7% |
97.7% |
73.2% |
73.2% |
36.6% |
18.3% |
There
is also the consideration of the time required to read a cluster.
Consider a disk for which the maximum data rate is 8
MB per second.
Here, we are saying that 8MB = 223 bytes. More on this later.
|
Sectors in Cluster |
1 |
2 |
4 |
8 |
16 |
32 |
64 |
|
Bytes in Cluster |
29 |
210 |
211 |
212 |
213 |
214 |
215 |
|
Transfer time |
2-14 |
2-13 |
2-12 |
2-11 |
2-10 |
2-9 |
2-8 |
|
Time in msec. |
0.06 |
0.122 |
0.244 |
0.488 |
0.977 |
1.95 |
3.91 |
Marketing
Hype: Sizing Large Disk Drives
All large disk drives are sized in gigabytes.
Traditionally 1GB = 230 bytes = 1, 073,
741, 824 bytes.
Recent commercial practice uses 1GB = 109
bytes = 1, 000, 000 ,000 bytes.
Let’s look at some comparative sizes.
Size
in GB Size in
GB
with 1GB = 109 bytes with 1GB = 230 bytes
10 9.314
40 37.25
80 74.51
200 186.3
Some disk utilities will report free disk space using
both units.
This is the reason for the discrepancies.
Computing
Disk Capacities
The capacity of a disk drive is expressed in a number
of equivalent ways.
Disk Capacity =
(number of surfaces)·(bytes per surface)
=
(number of surfaces)·(tracks per surface)·(bytes per track)
=
(number of surfaces)·(tracks per surface)
· (sectors per track)·512
Data from
an earlier disk drive (now rather small).
8
surfaces
3196
tracks per surface
132
sectors per track
512
bytes per sector
Surface capacity = 3196·132·512 = 421872·512 = 210936·1024 bytes
=
210936 KB » 206.0 MB
Disk capacity = 8·210936 KB = 1,687,488 KB » 1.61 GB
Computing
Disk Maximum Transfer Rate
Disk rotation rates are given in RPM (Revolutions per
Minute).
Common values are 3,600 RPM, 7,200 RPM, and higher.
3,600 RPM is 60 revolutions per second. 7,200 PRM is 120 per second.
Disks can transfer at maximum rate while reading from
a single cylinder.
Moving to another cylinder takes time, called the
track–to–track seek time.
Consider our sample disk. Suppose it rotates at 7,200 RPM.
One revolution every (1/120) second.
One track contains 132·512 bytes = 66·1024 bytes = 66KB.
This track can be read in (1/120) of a second.
The maximum data rate is 66 KB in (1/120) of a second.
120
· 66 KB in one second.
7,920
KB per second = 7.73 MB per second.
Sustaining
the Maximum Data Transfer Rate
Recall the definition of a cylinder as a set of
tracks, one per surface.
The number of tracks per cylinder is always exactly
the same
as the number of surfaces in the disk drive.
Our sample drive has 8 surfaces; each cylinder has 8
tracks.
Each track can be read in one revolution of the disk
drive.
The data rate can be sustained for as long as it takes
to read all tracks from the cylinder.
In our sample drive, rotating at 7200 RPM or 120 per
second:
Each
track can be read in 1/120 second.
The
cylinder, containing 8 tracks, is read in 8/120 second or 1/15 second.
The maximum data transfer rate can be sustained for
1/15 second.
Modern Disk
Organization
Older disk drives divided the surface into a number of
equally sized tracks.
This facilitated design of the disk controller, but
made poor use of the disk surface,
as the inner tracks (with maximum linear density) determined the number of
sectors.
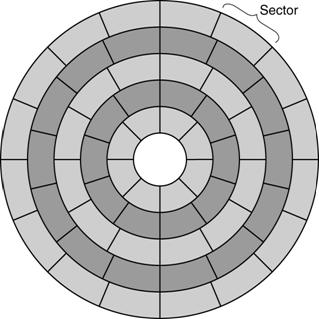
Modern disk drives divide the disk surface into a
number of zones.
Each zone has the same number of sectors per track.
This
gives only a modest increase in complexity of the controller.
Security
Issues: Erasing and Reformatting
Remember the disk directory and the FAT.
What happens when a file is erased from the disk? Are the file data removed?
Answer: No, the
file data are not removed. What actually
happens is:
1. The file name is removed from the disk
directory.
2. The FAT is modified to place all the sectors
(clusters) for that file
into a special file, called
the “Free List”.
3. Sectors do not have their data erased or
changed until they are allocated
to another file and that a
program writes data to that file.
For this reason, many companies sell utilities to
“Wipe the File” or “Shred the File”.
How about
reformatting the disk? Certainly, that
removes data.
Answer: No, the file data are not removed.
The directory structure and FAT are reinitialized.
The free list is built in an efficient form.
The sectors containing data are not overwritten.
PCI Express
This lecture is based on the Peripheral
Component Interconnect Express,
which is a standard for computer expansion cards.
More specifically, this is a standard for the
communication link by which a
PCIe device communicates with the CPU.
According to Wikipedia, PCIe 3.0 (August 2007)
is the latest standard.
The PCIe standard is an outgrowth of the
original PCI standard, but is not
compatible with PCI at the hardware level.
The PCIe standard is based on a new protocol
for electrical signaling.
This protocol is built on the concept of a lane, which we must define.
Here are some capacity quotes from Wikipedia
Per Lane 16–Lane Slot
Version 1 250 MB/s 4 GB/s
Version 2 500 MB/s 8 GB/s
Version 3 1 GB/s 16 GB/s
What
is a Lane?
A lane is pair of point–to–point serial links.
It is a full–duplex link, able to communicate
in two directions simultaneously.
Each of the serial links in the pair handles one of the two directions.
By definition, a serial link transmits one bit at a time.
By extension, a lane may transmit two bits at any one time,
one bit in each direction.
One may view a parallel link, transmitting multiple bits in one direction
at any given time, as a collection of serial links.
The only difference is that a parallel link
must provide for synchronization
of the bits sent by the individual links.
Data
Transmission Codes
The PCIe standard is byte oriented, in that it
should be viewed logically
as a full–duplex byte stream. What is
actually transmitted?
The association of bits (transmitted or received)
with bytes is handled at the
Data Link layer. Suppose a byte is to be
transmitted serially.

The conversion from byte data to bit–oriented
data for serial transmission
is done by a shift register. The
register takes in eight bits at a time and
shifts out one bit at a time.
The bits, as shifted out, are still
represented in standard logic levels.
The serial transmit unit takes the standard
logic levels as input, and
converts them to voltage levels appropriate for serial transmission.
Three
Possible Transmission Codes
The serial transmit unit sends data by
asserting a voltage on the serial link.
On simple method would be as follows.
To transmit a logic 1, assert +5
volts on the transmission line.
To transmit a logic 0, assert 0
volts on the transmission line.
This simple method has so many difficulties in
practice that it cannot be used.
Two of the most obvious are transmission of power and lack of data framing.
Standard methods for link management use codes
that avoid these problems.
Two of the more common methods used are NRZ and NRZI.
Non–Return–to–Zero coding transmits by
asserting the following voltages:
For a logic 1, it asserts a
positive voltage (3.0 – 5.0 volts) on the link.
For a logic 0, it asserts a
negative voltage (–3.0 to –5.0 volts).
Non–Return–to–Zero–Invert is a modification of
NRZ, using the same
voltage levels.
The
Problem of Noise
One problem with these serial links is that
they function as antennas.
They will pick up any stray electromagnetic radiation if in the radio range.

In other words, the signal received at the
destination might not be what
was actually transmitted. It might be
the original signal, corrupted by noise.
The solution to the problem of noise is based
on the observation that two links
placed in close proximity will receive noise signals that are almost identical.
To make use of this observation, we use differential transmitters to send the
signals and differential receivers
to reconstruct the signals.
Differential
Transmitters and Receivers
In differential transmission, rather than
asserting a voltage on a single output
line, the transmitter asserts two voltages: +V/2 and –V/2.
A +6 volt signal would be asserted as two: +3
volts and –3 volts.
A –8 volt signal would be asserted as two: –4
volts and +4 volts.
Here is a standard diagram of a differential
transmitter.
The standard differential receiver is an
analog subtractor.
For
a 6 volt transmitted signal, we have A = 3, B = –3; A – B = 3 – (–3) = 6.
Noise
in a Differential Link
We now assume that the lines used to transmit
the differential signals are
physically close together, so that each line is subject to the same noise
signal.
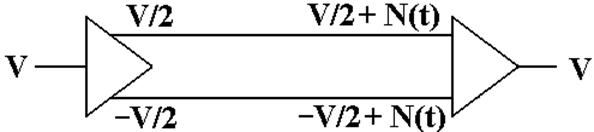
Here the received signal is the difference of
the two voltages input to
the differential receiver.
The value received is V/2 – (–V/2) = V, the
desired value.
Ground
Offsets in Standard Links
All voltages are measured relative to a
standard value, called “ground”.
Here is the complete version of the simple
circuit that we want to implement.

Basically, there is an assumed second
connection between the two
devices. This second connection fixes
the zero level for the voltage.
There is no necessity for the two devices to
have the same ground. Suppose
that the ground for the receiver is offset from the ground of the transmitter.

The signal sent out as +V(t) will be received
as V(t) – VO.
Ground
Offsets in Differential Links
Here again, the subtractor in the differential
receiver handles this problem.
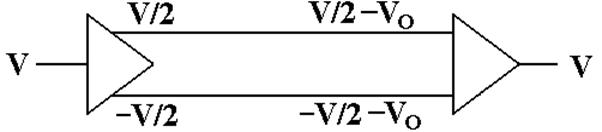
The signal originates as a given voltage,
which can be positive, negative, or 0.
The signal is transmitted as the pair (+V/2,
–V/2).
Due to the ground offset for the receiver, the
signal is taken in as
(+V/2 – VO, –V/2 – VO).
The signal is interpreted as
(+V/2 – VO) – (–V/2 – VO) = +V/2 – VO + V/2 +
VO = V.
The differential link will correct for both
ground offset and line noise
at the same time.
References
1. Wikipedia http://en.wikipedia.org/wiki/PCI_Express
2. Wikipedia http://en.wikipedia.org/wiki/File:Differential_Signaling.png
{kind=link}
3. Web
Site http://www.interfacebus.com/Design_Connector_RS422.html
4. Wikipedia http://en.wikipedia.org/wiki/RS-422