SDRAM
– Synchronous Dynamic Random Access Memory
As we mentioned above, the relative
slowness of memory as compared to the CPU has long
been a point of concern among computer designers. One recent development that is used to
address this problem is SDRAM – synchronous dynamic access memory.
The standard memory types we have
discussed up to this point are
SRAM Static Random Access Memory
Typical access
time: 5 – 10 nanoseconds
Implemented with 6
transistors: costly and fairly large.
DRAM Dynamic
Random Access Memory
Typical access
time: 50 – 70 nanoseconds
Implemented with
one capacitor and one transistor: small and cheap.
In a way, the desirable approach
would be to make the entire memory to be SRAM.
Such a
memory would be about as fast as possible, but would suffer from a number of
setbacks,
including very large cost (given current economics a 256 MB memory might cost
in excess of
$20,000) and unwieldy size. The current
practice, which leads to feasible designs, is to use large
amounts of DRAM for memory. This leads
to an obvious difficulty.
1) The access time on DRAM is almost never
less than 50 nanoseconds.
2) The
clock time on a moderately fast (2.5 GHz) CPU is 0.4 nanoseconds,
125 times faster than the
DRAM.
The problem that arises from this
speed mismatch is often called the “Von Neumann Bottleneck”
– memory cannot supply the CPU at a sufficient data rate. Fortunately there have been a number
of developments that have alleviated this problem. We will soon discussed the idea of cache
memory, in which a large memory with
a 50 to 100 nanosecond access time can be coupled with
a small memory with a 10 nanosecond access time. While cache memory does help, the main
problem is that main memory is too slow.
In his 2010 book [R033], William
Stallings introduced his section on advanced DRAM
organization (Section 5.3, pages 173 to 179) with the following analysis of
standard memory
technology, which I quote verbatim.
“As discussed in Chapter 2 [of the reference], one of the
most critical system
bottlenecks when using high–performance processors is the interface to main
internal memory. This interface is the
most important pathway in the entire
computer system. The basic building
block of memory remains the DRAM
chip, as it has for decades; until recently, there had been no significant
changes
in DRAM architecture since the early 1970s.
The traditional DRAM chip is
constrained both by its internal architecture and by its interface to the
processor’s memory bus.”
Modern computer designs, in an
effort to avoid the Von Neumann bottleneck, use several tricks,
including multi–level caches and DDR SDRAM main memory. We continue to postpone the
discussion of cache memory, and focus on methods to speed up the primary memory
in order to
make it more compatible with the faster, and more expensive, cache.
Many of the modern developments in
memory technology involve Synchronous
Dynamic
Random Access Memory, SDRAM for
short. Although we have not mentioned
it, earlier
memory was asynchronous, in that the memory speed was not related to any
external speed. In
SDRAM, the memory is synchronized to the system bus and can deliver data at the
bus speed.
The earlier SDRAM chips could deliver one data item for every clock pulse;
later designs called
DDR SDRAM (for Double Data Rate SDRAM) can deliver two data items per clock
pulse.
Double Data Rate SDRAM (DDR–SDRAM) doubles the bandwidth available from SDRAM
by transferring data at both edges of the clock.
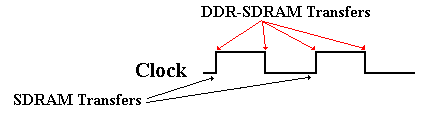
Figure: DDR-SDRAM Transfers Twice as Fast
As an example, we quote from the Dell Precision T7500
advertisement of June 30, 2011. The
machine supports dual processors, each with six cores. Each of the twelve cores has two 16 KB
L1 caches (an Instruction Cache and a Data Cache) and a 256 KB (?) L2
cache. The processor
pair shares a 12 MB Level 3 cache. The
standard memory configuration calls for
4GB or DDR3 memory, though the system will support up to 192 GB. The memory bus
operates at 1333MHz (2666 million transfers per second). If it has 64 data lines to the L3 cache
(following the design of the Dell Dimension 4700 of 2004), this corresponds to
2.666·109 transfers/second ·
8 bytes/transfer » 2.13·1010 bytes per second. This is a peak
transfer rate of 19.9 GB/sec.
The SDRAM chip uses a number of
tricks to deliver data at an acceptable rate.
As an example,
let’s consider a modern SDRAM chip capable of supporting a DDR data bus. In order to
appreciate the SDRAM chip, we must begin with simpler chips and work up.
We begin with noting an approach
that actually imposes a performance hit – address
multiplexing. Consider an NTE2164, a
typical 64Kb chip. With 64K of
addressable units, we
would expect 16 address lines, as 64K = 216. In stead we find 8 address lines and two
additional
control lines
![]() Row
Address Strobe (Active Low)
Row
Address Strobe (Active Low)
![]() Column
Address Strobe (Active Low)
Column
Address Strobe (Active Low)
Here is how it works. Recalling that 64K = 216 = 28
· 28 = 256 · 256, we organize the memory
as a 256-by-256 square array. Every item
in the memory is uniquely identified by two addresses
– its row address and its column address.
Here is the way that the 8-bit
address is interpreted.
|
|
|
Action |
|
0 |
0 |
An
error – this had better not happen. |
|
0 |
1 |
It
is a row address (say the high order 8-bits of the 16-bit address) |
|
1 |
0 |
It
is a column address (say the low order 8-bits of the 16-bit address) |
|
1 |
1 |
It is ignored. |
Here is that way that the NTE2164 would be addressed.
1) Assert
![]() = 0 and place
the A15 to A8 on the 8–bit address bus.
= 0 and place
the A15 to A8 on the 8–bit address bus.
2) Assert
![]() = 0 and place A7
to A0 on the 8–bit address bus.
= 0 and place A7
to A0 on the 8–bit address bus.
There are two equivalent design
goals for such a design.
1) To
minimize the number of pins on the memory chip.
We have two options:
8 address pins,
RAS, and CAS (10 pins), or
16 address pins
and an Address Valid pin (17 pins).
2) To minimize the number of address–related
lines on the data bus.
The same numbers
apply here: 10 vs. 17.
With this design in mind, we are
able to consider the next step in memory speed-up. It is
called Fast-Page Mode DRAM, or
FPM–DRAM.
Fast-Page Mode DRAM implements page mode, an improvement on
conventional DRAM in
which the row-address is held constant and data from multiple columns is read
from the sense
amplifiers. The data held in the sense
amps form an “open page” that can be accessed relatively
quickly. This speeds up successive
accesses to the same row of the DRAM core.
The move from FPM–DRAM to SDRAM is
logically just making the DRAM interface
synchronous to the data bus in being controlled by a clock signal propagated on
that bus. The
design issues are now how to create a memory chip that can respond sufficiently
fast. The
underlying architecture of the SDRAM core is the same as in a conventional
DRAM.
SDRAM transfers data at one edge of the clock, usually the leading edge.
So far, we have used a SRAM memory
as a L1 cache to speed up effective memory access time
and used Fast Page Mode DRAM to allow quick access to an entire row from the DRAM
chip.
We continue to be plagued with the problem of making the DRAM chip faster. If we are to use
the chip as a DDR–SDRAM, we must speed it up quite a bit.
Modern DRAM designs are increasing
the amount of SRAM on the DRAM die. In
most cases
a memory system will have at least 8KB of SRAM on each DRAM chip, thus leading
to the
possibility of data transfers at SRAM speeds.
We are now faced with two measures:
latency and bandwidth.
Latency is the amount of time for
the memory to provide the first element of a block
of contiguous data.
Bandwidth is the rate at which the
memory can deliver data once the row address
has been accepted.
One can increase the bandwidth of
memory by making the data bus “wider” – that is able to
transfer more data bits at a time. It
turns out that the optimal size is half that of a cache line in
the L2 cache. Now – what is a cache
line?
In order to understand the concept
of a cache line, we must return to our discussion of cache
memory. What happens when there is a cache
miss on a memory read? The referenced
byte
must be retrieved from main memory.
Efficiency is improved by retrieving not only the byte
that is requested, but also a number of nearby bytes.
Cache
memory is organized into cache lines.
Suppose that we have a L2 cache with a cache line
size of 16 bytes. Data could be
transferred from main memory into the L2 cache in units of 8 or
16 bytes. This depends on the size of
the memory bus; 64 or 128 bits.
Suppose that the byte with address
0x124A is requested and found not to be in the L2 cache. A
cache line in the L2 cache would be filled with the 16 bytes with addresses
ranging from 0x1240
through 0x124F. This might be done in
two transfers of 8 bytes each.
We close this part of the discussion
by examining some specifications of a memory chip that as
of July 2011 seemed to be state-of-the-art.
This is the Micron DDR2 SDRAM in 3 models
MT46H512M4 64 MEG x 4 x 8 banks
MT47H256M8 32 MEG x 8 x 8 banks
MT47H128M16 16 MEG x 16 x 8 banks
Collectively, the memories are
described by Micron [R89] as “high-speed dynamic random–
access memory
that uses a 4ns–prefetch architecture with an interface designed to transfer
two
data words per
clock cycle at the I/O bond pads.” But what is “prefetch architecture”?
According
to Wikipedia [R034]
“The prefetch buffer takes advantage of the specific characteristics of
memory
accesses to a DRAM. Typical DRAM memory operations involve three phases
(line precharge, row access, column access). Row access is … the long and slow
phase of memory operation. However once a row is read, subsequent column
accesses to that same row can be very quick, as the sense amplifiers also act
as
latches. For reference, a row of a 1Gb DDR3 device is 2,048 bits wide, so that
internally 2,048 bits are read into 2,048 separate sense amplifiers during the
row
access phase. Row accesses might take 50 ns depending on the speed of the
DRAM, whereas column accesses off an open row are less than 10 ns.”
“In a prefetch buffer architecture, when a memory access occurs to a row the
buffer
grabs a set of adjacent datawords on the row and reads them out
("bursts" them) in
rapid-fire sequence on the IO pins, without the need for individual column
address
requests. This assumes the CPU wants adjacent datawords in memory which in
practice is very often the case. For instance when a 64 bit CPU accesses a 16
bit
wide DRAM chip, it will need 4 adjacent 16 bit datawords to make up the full 64
bits. A 4n prefetch buffer would accomplish this exactly ("n" refers
to the IO width
of the memory chip; it is multiplied by the burst depth "4" to give
the size in bits of
the full burst sequence).”
“The prefetch buffer depth can also be thought of as the ratio between the
core
memory frequency and the IO frequency. In an 8n prefetch architecture (such as
DDR3), the IOs will operate 8 times faster than the memory core (each memory
access results in a burst of 8 datawords on the IOs). Thus a 200 MHz memory
core
is combined with IOs that each operate eight times faster (1600
megabits/second).
If the memory has 16 IOs, the total read bandwidth would be 200 MHz x 8
datawords/access x 16 IOs = 25.6 gigabits/second (Gbps), or 3.2
gigabytes/second
(GBps). Modules with multiple DRAM chips can provide
correspondingly higher
bandwidth.”
Each is compatible with 1066 MHz
synchronous operation at double data rate.
For the
MT47H128M16 (16 MEG x 16 x 8 banks, or 128 MEG x 16), the memory bus can
apparently be
operated at 64 times the speed of internal memory; hence the 1066 MHz.
Here is a functional block diagram
of the 128 Meg x 16 configuration, taken from the Micron
reference [R91]. Note that there is a
lot going on inside that chip.
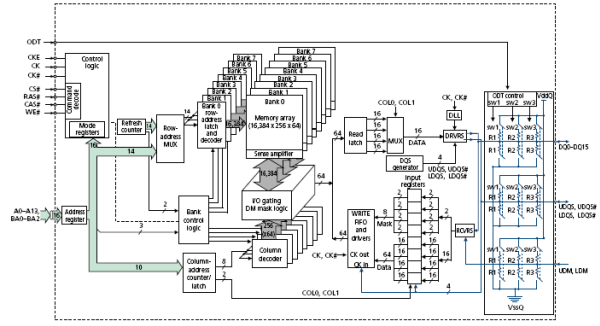
Here are
the important data and address lines to the memory chip.
A[13:0] The address inputs; either row address or
column address.
DQ[15:0] Bidirectional data input/output lines for the
memory chip.
A few of these control signals are worth mention. Note that most of the control signals are
active–low; this is denoted in the modern notation by the sharp sign.
CS# Chip Select. This is active low, hence the “#” at the end
of the signal name.
When low, this enables
the memory chip command decoder.
When high, is disables
the command decoder, and the chip is idle.
RAS# Row Address Strobe. When enabled, the address refers to the row
number.
CAS# Column Address Strobe. When enabled, the address refers to the
column
WE# Write Enable. When enabled, the CPU is writing to the
memory.
The following truth table explains
the operation of the chip.
|
CS# |
RAS# |
CAS# |
WE# |
Command / Action |
|
1 |
d |
d |
d |
Deselect
/ Continue previous operation |
|
0 |
1 |
1 |
1 |
NOP
/ Continue previous operation |
|
0 |
0 |
1 |
1 |
Select
and activate row |
|
0 |
1 |
0 |
1 |
Select
column and start READ burst |
|
0 |
1 |
0 |
0 |
Select
column and start WRITE burst |
The
Cache Model
The next figure shows a simple memory hierarchy, sufficient
to illustrate the two big ideas
about multi–level memory: cache memory and virtual memory.

Figure:
The Memory Hierarchy with Cache and Virtual Memory
We consider
a multi-level memory system as having a faster primary memory and a slower
secondary memory. In cache memory, the cache is the faster
primary memory and the main
memory is the secondary memory. We shall
ignore virtual memory at this point.
Program Locality: Why Does A Cache Work?
The design goal for cache memory is to create a memory unit
with the performance of SRAM,
but the cost and packaging density of DRAM.
In the cache memory strategy, a fast (but small)
SRAM memory fronts for a larger and slower DRAM memory. The reason that this can cause
faster program execution is due to the principle
of locality, first discovered by Peter J. Denning
as part of his research for his Ph.D.
The usual citation for Denning’s work on program locality is
his ACM paper [R78].
The basic idea behind program locality is the observed
behavior of memory references; they tend
to cluster together within a small range that could easily fit into a small
cache memory. There
are generally considered to be two types of locality. Spatial
locality refers to the tendency of
program execution to reference memory locations that are clustered; if this
address is accessed,
then one very near it will be accessed soon.
Temporal locality refers to
the tendency of a
processor to access memory locations that have been accessed recently. In the less common case
that a memory reference is to a “distant address”, the cache memory must be
loaded from another
level of memory. This event, called a “memory miss”, is rare enough that most
memory
references will be to addresses represented in the cache. References to addresses in the cache are
called “memory hits”; the percentage
of memory references found in the cache is called the
“hit ratio”.
It is possible, though artificial, to write programs that
will not display locality and thus defeat the
cache design. Most modern compilers will
arrange data structures to take advantage of locality,
thus putting the cache system to best use.
Effective
Access Time for Multilevel Memory
We have stated that the success of a multilevel memory
system is due to the principle of locality.
The measure of the effectiveness of this system is the hit ratio,
reflected in the effective access
time of the memory system.
We shall consider a multilevel memory system with primary
and secondary memory. What we
derive now is true for both cache memory and virtual memory systems. In this course, we shall
use cache memory as an example. This
could easily be applied to virtual memory.
In a standard memory system, an addressable item is
referenced by its address. In a two
level
memory system, the primary memory is first checked for the address. If the addressed item is
present in the primary memory, we have a hit, otherwise we have a
miss. The hit ratio is defined
as the number of hits divided by the total number of memory accesses; 0.0 £
h £ 1.0. Given a
faster primary memory with an access time TP and a slower secondary
memory with access time
TS, we compute the effective access time as a function of the hit
ratio. The applicable formula is
TE = h·TP + (1.0 – h)·TS.
RULE: In this
formula we must have TP < TS. This inequality defines the terms “primary”
and “secondary”. In this course TP always refers to
the cache memory.
For our first example, we consider cache memory, with a fast cache acting as a front-end for
primary memory. In this scenario, we
speak of cache hits and cache misses. The hit ratio is
also called the cache hit ratio in
these circumstances. For example,
consider TP = 10
nanoseconds and TS = 80 nanoseconds.
The formula for effective access time becomes
TE = h·10 + (1.0 – h)·80.
For sample values of hit ratio
Hit
Ratio Access Time
0.5 45.0
0.9 17.0
0.99 10.7
The reason
that cache memory works is that the principle of locality enables high values
of the
hit ratio; in fact h ³ 0.90 is a reasonable value.
For this reason, a multi-level memory structure
behaves almost as if it were a very large memory with the access time of the
smaller and faster
memory. Having come up with a technique
for speeding up our large monolithic memory, we
now investigate techniques that allow us to fabricate such a large main memory.
Cache Memory Organization
We now
turn our attention to strategies for organizing data in a cache. While this discussion is
cast in terms of a single–level cache, the basic principles apply to every
level in a
multi–level cache. In this section, we
use the term “memory”, sometimes “secondary
memory”, to refer to the memory
attached to the cache. It is possible
that this memory is either
the primary DRAM or a slower and larger cache
The
mapping of the secondary memory to the smaller cache is “many to one” in that
each cache
block can contain a number of secondary memory addresses. To compensate for each of these,
we associate a tag with each cache
block, also called a “cache line”.
For
example, consider a byte–addressable memory with 24–bit addresses and 16 byte
blocks.
The memory address would have six hexadecimal digits. Consider the 24–bit address
0xAB7129. The block containing that
address contains every item with address beginning with
0xAB712: 0xAB7120, 0xAB7121, … , 0xAB7129, 0xAB712A, … 0xAB712F.
We should
point out immediately that the secondary memory will be divided into blocks of
size
identical to the cache line. If the
secondary memory has 16–byte blocks, this is due to the
organization of the cache as having cache lines holding 16 bytes of data.
The
primary block would have 16 entries, indexed 0 through F. It would have the 20–bit tag
0XAB712 associated with the block, either explicitly or implicitly.
At system
start–up, the faster cache contains no valid data, which are copied as needed
from
the slower secondary memory. Each block
would have three fields associated with it
The tag
field identifying the memory addresses
contained
Valid bit set to 0 at system start–up.
set to
1 when valid data have been copied into the block
Dirty bit set to 0 at system start–up.
set to
1 whenever the CPU writes to the faster memory
set to
0 whenever the contents are copied to the slower memory.
The basic
unit of a cache is called a “cache line”,
which comprises the data copied from the
slower secondary memory and the required ID fields. A 16–KB cache might contain 1,024
cache lines with the following structure.
|
D bit |
V Bit |
Tag |
16
indexed entries (16 bytes total) |
|
0 |
1 |
0xAB712 |
M[0xAB7120]
… M[0xAB712F] |
We now face a problem that is unique to cache memories. How do we find an addressed item?
In the primary memory, the answer is simple; just go to the address and access
the item. The
cache has much fewer addressable entities than the secondary memory. For example, this cache
has 16 kilobytes set aside to store a selection of data from a 16 MB
memory. It is not possible to
assign a unique address for each possible memory item.
The choice
of where in the cache to put a memory block is called the placement problem. The
method of finding a block in the cache might be called the location
problem. We begin with the
simplest placement strategy. When a
memory block is copied into a cache line, just place it in
the first available cache line. In that
case, the memory block can be in any given cache line. We
now have to find it when the CPU references a location in that block.
The Associative Cache
The most
efficient search strategy is based on associative
memory, also called content
addressable memory. Unlike sequential searches or binary search
on an array, the contents of
an associative memory are all searched at the same time. In terminology from the class on
algorithm analysis, it takes one step to search an associative memory.
Consider
an array of 256 entries, indexed from 0 to 255 (or 0x0 to 0xFF). Suppose that we are
searching the memory for entry 0xAB712. Normal memory would be searched using a
standard search algorithm, as learned in beginning programming classes. If the memory is
unordered, it would take on average 128 searches to find an item. If the memory is ordered,
binary search would find it in 8 searches.
Associative memory
would find the item in one search. Think
of the control circuitry as
“broadcasting” the data value (here 0xAB712) to all memory cells at the same
time. If one of
the memory cells has the value, it raises a Boolean flag and the item is found.
We do not
consider duplicate entries in the associative memory. This can be handled by some
rather straightforward circuitry, but is not done in associative caches. We now focus on the use
of associative memory in a cache design, called an “associative cache”.
Assume a
number of cache lines, each holding 16 bytes.
Assume a 24–bit address. The
simplest
arrangement is an associative cache. It is also the hardest to implement.
Divide the
24–bit address into two parts: a 20–bit tag and a 4–bit offset. The 4–bit offset is
used to select the position of the data item in the cache line.
|
Bits |
23
– 4 |
3
– 0 |
|
Fields |
Tag |
Offset |
A cache line in this arrangement would have the following
format.
|
D
bit |
V
Bit |
Tag |
16
indexed entries |
|
0 |
1 |
0xAB712 |
M[0xAB7120]
… M[0xAB712F] |
The placement of the 16 byte block of memory into the cache
would be determined by a cache
line replacement policy. The policy would probably be as follows:
1. First, look for a cache line with V = 0. If one is found, then it is “empty”
and available, as
nothing is lost by writing into it.
2. If all cache lines have V = 1, look for one
with D = 0. Such a cache line
can be overwritten
without first copying its contents back to main memory.
When the
CPU issues an address for memory access, the cache logic determines the part
that is
to be used for the cache line tag (here 0xAB712) and performs an associative
search on the tag
part of the cache memory. Only the tag
memory in an associative cache is set up as true
associative memory; the rest is standard SRAM.
One might consider the associative cache as
two parallel memories, if that helps.
After one
clock cycle, the tag is either found or not found. If found, the byte is retrieved. If not,
the byte and all of its block are fetched from the secondary memory.
The Direct Mapped Cache
This
strategy is simplest to implement, as the cache line index is determined by the
address.
Assume 256 cache lines, each holding 16 bytes.
Assume a 24–bit address. Recall
that 256 = 28,
so that we need eight bits to select the cache line.
Divide the
24–bit address into three fields: a 12–bit explicit tag, an 8–bit line number,
and a
4–bit offset within the cache line. Note
that the 20–bit memory tag is divided between the
12–bit cache tag and 8–bit line number.
|
Bits |
23
– 12 |
11
– 4 |
3
– 0 |
|
Cache
View |
Tag |
Line |
Offset |
|
Address
View |
Block
Number |
Offset |
|
Consider the address 0xAB7129. It would have
Tag = 0xAB7
Line = 0x12
Offset = 0x9
Again, the
cache line would contain M[0xAB7120] through M[0xAB712F]. The cache line
would also have a V bit and a D bit (Valid and Dirty bits). This simple implementation often
works, but it is a bit rigid. Each
memory block has one, and only one, cache line into which it
might be placed. A design that is a
blend of the associative cache and the direct mapped cache
might be useful.
An N–way set–associative cache uses direct
mapping, but allows a set of N memory blocks to
be stored in the line. This allows some
of the flexibility of a fully associative cache, without the
complexity of a large associative memory for searching the cache.
Suppose a
2–way set–associative implementation of the same cache memory. Again assume 256
cache lines, each holding 16 bytes.
Assume a 24–bit address. Recall
that 256 = 28, so that we
need eight bits to select the cache line.
Consider addresses 0xCD4128 and 0xAB7129. Each
would be stored in cache line 0x12. Set
0 of this cache line would have one block, and set 1
would have the other.
|
Entry
0 |
Entry
1 |
||||||
|
D |
V |
Tag |
Contents |
D |
V |
Tag |
Contents |
|
1 |
1 |
0xCD4 |
M[0xCD4120]
to M[0xCD412F] |
0 |
1 |
0xAB7 |
M[0xAB7120]
to M[0xAB712F] |
Examples
of Cache Memory
We need to
review cache memory and work some specific examples. The idea is simple, but
fairly abstract. We must make it clear
and obvious. To review, we consider the
main memory of
a computer. This memory might have a
size of 384 MB, 512 MB, 1GB, etc. It is
divided into
blocks of size 2K bytes, with K > 2.
In
general, the N–bit address is broken into two parts, a block tag and an offset.
The most significant (N
– K) bits of the address are the block tag
The least significant K
bits represent the offset within the block.
We use a
specific example for clarity.
We have a byte
addressable memory, with a 24–bit address.
The cache block size is
16 bytes, so the offset part of the address is K = 4 bits.
In our
example, the address layout for main memory is as follows:
Divide the 24–bit address into two parts: a 20–bit tag and a 4–bit offset.
|
Bits |
23
– 4 |
3
– 0 |
|
Fields |
Tag |
Offset |
Let’s examine the sample address, 0xAB7129, in terms of the bit divisions above.
|
Bits: |
23
– 20 |
19
– 16 |
15
– 12 |
11
– 8 |
7
– 4 |
3
– 0 |
|
Hex
Digit |
A |
B |
7 |
1 |
2 |
9 |
|
Field |
0xAB712 |
0x09 |
||||
So, the tag field for this block contains the value
0xAB712. The tag field of the cache line
must
also contain this value, either explicitly or implicitly. It is the cache line
size that determines the
size of the blocks in main memory. They
must be the same size, here 16 bytes.
All cache
memories are divided into a number of cache lines. This number is also a power of
two. Our example has 256 cache
lines. Where in the cache is the memory
block placed?
Associative Cache
As a
memory block can go into any available cache line, the cache tag must represent
the memory tag explicitly: Cache Tag =
Block Tag. In our example, it is
0xAB712.
Direct Mapped and Set–Associative
Cache
For any
specific memory block, there is exactly one cache line that can contain it.
Suppose an
N–bit address space. 2L cache
lines, each of 2K bytes.
|
Address
Bits |
(N
– L – K) bits |
L
bits |
K
bits |
|
Cache
Address |
Cache
Tag |
Cache
Line |
Offset |
|
Memory
Address |
Memory
Block Tag |
Offset |
|
To retrieve the memory block tag from the cache tag, just
append the cache line number.
In our
example: The Memory Block Tag = 0xAB712
Cache Tag = 0xAB7
Cache Line = 0x12
Reading
From and Writing to the Cache
Let’s
begin our review of cache memory by considering the two processes: CPU Reads
from
Cache and CPU Writes to Cache.
Suppose
for the moment that we have a direct
mapped cache, with line 0x12 as follows:
|
Tag |
Valid |
Dirty |
Contents
(Array of 16 entries) |
|
0xAB7 |
1 |
0 |
M[0xAB7120]
to M[0xAB712F] |
Since the cache line has contents, by definition we must
have Valid = 1. For this example,
we assume that Dirty = 0 (but that is almost irrelevant here).
Read from Cache.
The CPU
loads a register from address 0xAB7123.
This is read directly from the cache.
Write to Cache
The CPU
copies a register into address 0xAB712C.
The appropriate page is present in the cache
line, so the value is written and the dirty bit is set; Dirty = 1. Note that the
dirty bit is not tested,
it is just set to 1. All that matters is
that there has been at least one write access to this cache
line.
Here is a
question that cannot occur for reading from the cache. Writing to the cache has
changed the value in the cache. The
cache line now differs from the corresponding block in
main memory. Eventually, the value
written to the cache line must be copied back to the
secondary memory, or the new value will be lost. The two main solutions to this problem are
called “write back” and “write through”.
Write Through
In this
strategy, every byte that is written to a cache line is immediately written
back to the
corresponding memory block. Allowing for
the delay in updating main memory, the cache line
and cache block are always identical.
The advantage is that this is a very simple strategy. No
“dirty bit” needed. The disadvantage in
the simple implementation is that writes to cache
proceed at main memory speed. Many
modern primary memories now have a write queue,
which is a fast memory containing entries to be written to the slower
memory. As long as the
queue does not fill, it can accept data at cache speeds.
Write Back
In this
strategy, CPU writes to the cache line do not automatically cause updates of
the
corresponding block in main memory.
The cache
line is written back only when it is replaced.
The advantage of this is that it is a faster
strategy. Writes always proceed at cache
speed. Furthermore, this plays on the
locality theme.
Suppose each entry in the cache is written, a total of 16 cache writes. At the end of this
sequence, the cache line will eventually be written to the slower memory. This is one slow
memory write for 16 cache writes. The
disadvantage of this strategy is that it is more complex,
requiring the use of a dirty bit.
Cache Line Replacement
Assume
that memory block 0xAB712 is present in cache line 0x12. We now get a memory
reference to address 0x895123. This is
found in memory block 0x89512, which must be placed
in cache line 0x12. The following holds
for both a memory read from or memory write to
0x895123. The process is as follows.
1. The valid bit for cache line 0x12 is
examined. If (Valid = 0), there is nothing
in the cache line, so go to
Step 5.
2. The memory tag for cache line 0x12 is
examined and compared to the desired
tag 0x895. If (Cache Tag = 0x895) go to Step 6.
3. The cache tag does not hold the required
value. Check the dirty bit.
If (Dirty = 0) go to Step 5.
4. Here, we have (Dirty = 1). Write the cache line back to memory block
0xAB712.
5. Read memory block 0x89512 into cache line
0x12. Set Valid = 1 and Dirty = 0.
6. With the desired block in the cache line,
perform the memory operation.
We have
three different major strategies for cache mapping.
Direct Mapping is the simplest strategy, but it is rather
rigid. One can devise “almost realistic”
programs that defeat this mapping. It is
possible to have considerable page replacement with a
cache that is mostly empty.
Fully Associative offers the most flexibility, in that all cache
lines can be used. This is also the
most complex, because it uses a larger associative memory, which is complex and
costly.
N–Way Set Associative is a mix of the two strategies. It uses a smaller (and simpler)
associative memory. Each cache line
holds N = 2K sets, each the size of a memory block.
Each cache line has N cache tags, one for each set.
Consider
variations of mappings to store 256 memory blocks.
Direct
Mapped Cache 256 cache lines
“1–Way Set Associative” 256 cache lines 1 set per line
2–Way Set Associative 128 cache lines 2 sets per line
4–Way Set Associative 64 cache lines 4 sets per line
8–Way Set Associative 32 cache lines 8 sets per line
16–Way Set Associative 16 cache lines 16 sets per line
32–Way Set Associative 8 cache lines 32 sets per line
64–Way Set Associative 4 cache lines 64 sets per line
128–Way Set Associative 2 cache lines 128 sets per line
256–Way Set Associative 1 cache line 256 sets per line
Fully Associative Cache 256 sets
N–Way Set
Associative caches can be seen as a hybrid of the Direct Mapped Caches
and Fully Associative Caches. As N goes
up, the performance of an N–Way Set Associative
cache improves. After about N = 8, the
improvement is so slight as not to be worth the
additional cost.
Cache
Memory in Modern Computer Systems
The above
discussion of a single level cache attached to main memory is sufficient to
illustrate
the main ideas behind cache memory. Modern
computer systems have gone far beyond this
simple design. We now jump into reality.
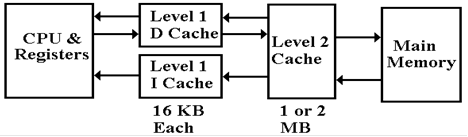
Almost all
modern computer systems have either a two–level (L1 and L2) or three–level
(L1, L2, and L3) cache system. Those
that do not, such as the CPU for the IBM z/10, have a
four–level cache. Furthermore, all
modern designs have a “split cache”
for the level 1; there is
an I–cache and D–cache (Instruction Cache and Data Cache) at this level. In order to illustrate
the advantages of these designs, we assume the following two–level design,
which is based on
the actual structure found in early Pentium designs.
We now
address two questions for this design before addressing the utility of a third
level in the
cache. The first question is why the L1
cache is split into two parts. The
second question is why
the cache has two levels. Suffice it to
say that each design decision has been well validated by
empirical studies; we just give a rationale.
There are
several reasons to have a split cache, either between the CPU and main memory
or
between the CPU and a higher level of cache.
One advantage is the “one way” nature of the L1
Instruction Cache; the CPU cannot write to it.
This means that the I–Cache is simpler and faster
than the D–Cache; faster is always better.
In addition, having the I–Cache provides some
security against self modifying code; it is difficult to change an instruction
just fetched and write
it back to main memory. There is also
slight security against execution of data; nothing read
through the D–Cache can be executed as an instruction.
The
primary advantage of the split level–1 cache is support of a modern pipelined
CPU. A
pipeline is more akin to a modern assembly line. Consider an assembly line in an auto
plant.
There are many cars in various stages of completion on the same line. In the CPU pipeline, there
are many instructions (generally 5 to 12) in various stages of execution. Even in the simplest
design, it is almost always the case that the CPU will try to fetch an instruction
in the same clock
cycle as it attempts to read data from memory or write data to memory.
Here is a
schematic of the pipelined CPU for the MIPS computer [R007].
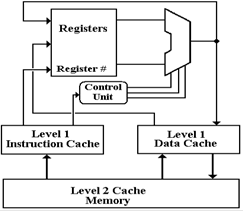 This shows two of the five stages of the MIPS pipeline.
This shows two of the five stages of the MIPS pipeline.
In any one clock period, the control unit will access the
Level 1 I–Cache and the ALU might access the L1
D–Cache. As the I–Cache and D–Cache are
separate
memories, they can be accessed at the same time with
no conflict.
We note
here that the ALU does not directly access the
D–Cache; it is the control unit either feeding data to a
register or writing the output from the ALU to primary
memory, through the D–Cache. The basic
idea is sound:
two memory accesses per clock tick.
There is
one slight objection possible to the split–cache design.
As we noted above, increasing
the hit rate on a cache memory results in faster access to the contents of both
that cache and,
indirectly, the memory being served by that cache. It should be obvious that the cache hit rate
is
lower for each of the smaller split L1 caches that it would be for a larger
combined L1 cache.
Empirical data suggests that the advantage of simultaneous access to both
instructions and data
easily overcomes the disadvantage of the slightly increased miss rate. Practical experience with
CPU design validates these empirical data.
The next
question relates to the multiplicity of cache levels. Why have a 64–KB L1 cache and a
1–MB (1,024 KB) L2 cache in preference to a 1,092–KB unified cache. Here is an answer based
on data for the Apple iMAC G5, as reported in class
lectures by David Patterson [R035]. The
access times and sizes for the various memory levels are as follows:
|
|
Registers |
L1
I–Cache |
L1
D–Cache |
L2
Cache |
DRAM |
|
Size |
1 KB |
64 KB |
32 KB |
512 KB |
256 MB |
|
Access
Time |
0.6 ns |
1.9 ns |
1.9 ns |
6.9 ns |
55 ns |
The basic point is that smaller caches have faster access
times. This, coupled with the principle
of locality implies that the two–level cache will have better performance than
a larger unified
cache. Again, industrial practice has
born this out.
The utility of a multi–level cache
is illustrated by the following example, based on the
access times given in the previous table.
Suppose the following numbers for each of the three memory levels.
L1 Cache Access Time = 0.60 nanoseconds Hit rate = 95%
L2 Cache Access Time = 1.90 nanoseconds Hit rate = 98%
Main Memory Access Time = 55.0 nanoseconds.
The one–level cache would be implemented with the access
time and hit rate of the L2
cache, as the one–level cache would be that size. The effective access time is thus:
TE = 0.98·1.90
+ (1 – 0.98)·55.0 = 0.98·1.90 + 0.02·55.0 = 1.862 + 1.10 = 2.972.
The two–level cache would use the L1 and L2 caches above and
have access time:
TE = 0.95·0.60
+ (1 – 0.95)·[0.98·1.90 + (1 – 0.98)·55.0]
= 0.95·0.60
+ 0.05·2.972 = 0.570 + 0.1486 = 0.719 nanoseconds.
The two–level cache system is about four times faster than
the bigger unified cache.
Cache and Multi–Core Processors
The goal of every CPU design is to
increase performance according to some type of relevant
benchmark. One way to do this is to
increase the clock rate of the CPU.
Another way to do this
is to add more cache memory on the CPU chip.
As transistor densities increase, both options
appear to be appealing. There is,
however, a problem with each of the options; as each increases,
the power density on the chip increases and the chip temperature climbs into a
range not
compatible with stable operation.
One way to handle this heat problem
is to devote more of the chip to cache memory and less to
computation. As noted by Stallings [R033],
“Memory transistors are smaller and have a power
density an order of magnitude lower than logic. … the percentage of the chip area devoted to
memory has grown to exceed 50% as the chip transistor density has increased.”
Here is a diagram of a quad–core
Intel Core i7 CPU. Each core has its own
L1 caches as well
as dedicated L2 cache. The four cores
share an 8–MB Level 3 cache.
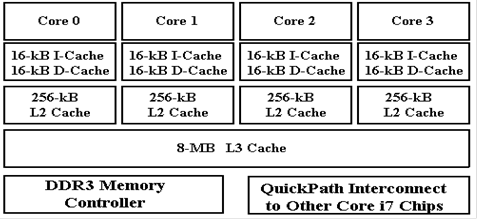
Figure: Intel Core i7 Block Diagram
Virtual
Memory
We now turn to the next example of a memory hierarchy, one
in which a magnetic disk normally
serves as a “backing store” for primary core memory. This is virtual memory. While many of
the details differ, the design strategy for virtual memory has much in common
with that of cache
memory. In particular, VM is based on
the idea of program locality.
Virtual memory has a precise definition and a definition
implied by common usage. We discuss
both. Precisely speaking, virtual memory
is a mechanism for translating logical
addresses (as
issued by an executing program) into actual physical memory addresses. The
address
translation circuitry is called a MMU
(Memory Management Unit).

This definition alone provides a great advantage to an Operating System, which can then
allocate processes to distinct physical memory locations according to some
optimization. This
has implications for security; individual programs do not have direct access to
physical memory.
This allows the OS to protect specific areas of memory from unauthorized
access.
Virtual
Memory in Practice
Although this is not the definition, virtual memory has
always been implemented by pairing a
fast DRAM Main Memory with a bigger, slower “backing store”. Originally, this was magnetic
drum memory, but it soon became magnetic disk memory. Here again is the generic two–stage
memory diagram, this time focusing on virtual memory.

The invention of time–sharing
operating systems introduced another variant of VM, now part
of the common definition. A program and
its data could be “swapped out” to the disk to allow
another program to run, and then “swapped in” later to resume.
Virtual memory allows the program to have a logical address
space much larger than the
computers physical address space. It
maps logical addresses onto physical addresses and moves
“pages” of memory between disk and
main memory to keep the program running.
An address space
is the range of addresses, considered as unsigned integers, that can be
generated. An N–bit address can access 2N
items, with addresses 0 … 2N – 1.
16–bit address 216
items 0 to 65535
20–bit address 220 items 0 to 1,048,575
32–bit address 232 items 0 to 4,294,967,295
In all modern applications, the physical address space is no
larger than the logical address space.
It is often somewhat smaller than the logical address space. As examples, we use a number of
machines with 32–bit logical address spaces.
Machine Physical Memory Logical Address Space
VAX–11/780 16 MB 4 GB (4, 096 MB)
Pentium (2004) 128 MB 4 GB
Desktop Pentium 512 MB 4 GB
Server Pentium 4 GB 4 GB
IBM z/10 Mainframe 384 GB 264
bytes = 234 GB
Organization
of Virtual Memory
Virtual memory is organized very much in the same way as
cache memory. In particular, the
formula for effective access time for a two–level memory system (pages 381 and
382 of this text)
still applies. The dirty bit and valid bit
are still used, with the same meaning.
The names are
different, and the timings are quite different.
When we speak of virtual memory, we use the
terms “page” and “page frame” rather than “memory block” and “cache line”. In the virtual
memory scenario, a page of the address space is copied from the disk and placed
into an equally
sized page frame in main memory.
Another minor difference between standard cache memory and
virtual memory is the way in
which the memory blocks are stored. In cache memory, both the tags and the data
are stored in a
single fast memory called the cache. In
virtual memory, each page is stored in main memory in a
place selected by the operating system, and the address recorded in a page
table for use of the
program.
Here is an example based on a configuration that runs
through this textbook. Consider a
computer with a 32–bit address space.
This means that it can generate 32–bit logical addresses.
Suppose that the memory is byte addressable, and that there are 224
bytes of physical memory,
requiring 24 bits to address. The
logical address is divided as follows:
|
Bits |
31 – 28 |
27 – 24 |
23 – 20 |
19 – 16 |
15 – 12 |
11 – 8 |
7 – 4 |
3 – 0 |
|
Field |
Page Number |
Offset in Page |
||||||
The
physical address associated with the page frame in main memory is organized as
follows
|
Bits |
23 – 20 |
19 – 16 |
15 – 12 |
11 – 8 |
7 – 4 |
3 – 0 |
|
Field |
Address Tag |
Offset in Page Frame |
||||
Virtual
memory uses the page table to
translate virtual addresses into physical addresses. In
most systems, there is one page table per process. Conceptually, the page table is an array,
indexed by page frame of the address tags associated with each process. But note that such an
array can be larger than the main memory itself. In our example, each address tag is a
12–bit value, requiring two bytes to store, as the architecture cannot access
fractional bytes. The
page number is a 20–bit number, from 0 through 1,048,575. The full page table would require
two megabytes of memory to store.
Each process on a computer will be
allocated a small page table containing mappings for the
most recently used logical addresses.
Each table entry contains the following information:
1. The valid bit, which indicates whether or not
there is a valid address tag (physical
page number) present in that
entry of the page table.
2. The dirty bit, indicating whether or not the
data in the referenced page frame
has been altered by the
CPU. This is important for page
replacement policies.
3. The 20–bit page number from the logical
address, indicating what logical page
is being stored in the
referenced page frame.
4. The 12–bit unsigned number representing the address
tag (physical page number).
More
on Virtual Memory: Can It Work?
Consider again the virtual memory system just
discussed. Each memory reference is
based on
a logical address, and must access the page table for translation.
But
wait! The
page table is in memory.
Does this imply
two memory accesses for each memory reference?
This is where the TLB
(Translation Look–aside Buffer) comes in.
It is a cache for a page
table, more accurately called the “Translation
Cache”.
The TLB is usually implemented as a split associative cache.
One associative cache for
instruction pages, and
One associative cache for data
pages.
A page table entry in main memory is accessed only if the
TLB has a miss.
The
Complete Page Table Structure
All page tables are under the control of the Operating
System, which creates a page table for
each process that is loaded into memory.
The computer hardware will provide a single register,
possibly called PTA (Page Table Address) that
contains the address of the page table for each
process, along with other information.
Each page table, both the master
table and each process table, has contents that vary depending
on the value in the valid bit.
If Valid = 1, the contents are the
12–bit address tag.
If Valid = 0, the contents are the
disk address of the page as stored on disk.
As the above implies, the page table
for a given process may be itself virtualized; that is
mostly stored in virtual memory. Only a
small part of a processes full page table must be in
physical memory for fast access. Of
that, a smaller part is in the TLB for faster access.
Virtual
Memory with Cache Memory
Any modern computer supports both virtual memory and cache
memory. We now consider
the interaction between the two.
The following example will illustrate the interactions. Consider a computer with a 32–bit
address space. This means that it can
generate 32–bit logical addresses.
Suppose that the
memory is byte addressable, and that there are 224 bytes of physical
memory, requiring 24 bits
to address. The logical address is
divided as follows:
|
Bits |
31 – 28 |
27 – 24 |
23 – 20 |
19 – 16 |
15 – 12 |
11 – 8 |
7 – 4 |
3 – 0 |
|
Field |
Page Number |
Offset in Page |
||||||
We suppose
further that virtual memory implemented using page sizes of 212 =
4096 bytes, and
that cache memory implemented using a fully associative cache with cache line
size of 16 bytes.
The physical address is divided as follows:
|
Bits |
23 – 20 |
19 – 16 |
15 – 12 |
11 – 8 |
7 – 4 |
3 – 0 |
|
Field |
Memory Tag |
Offset |
||||
Consider a
memory access, using the virtual memory. Conceptually, this is a two–step process.
First, the logical address is mapped into a physical address using the virtual
memory system.
Then the physical address is sent to the cache system to determine whether or
not there is a cache
hit.
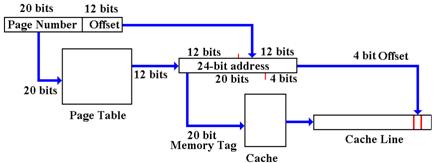
Figure: Two–Stage
Virtual Address Translation
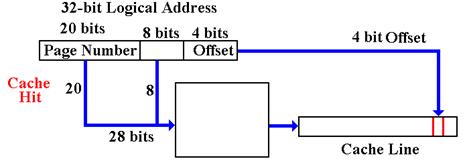
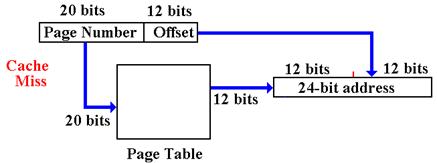
The
Virtually Mapped Cache
One solution to the inefficiencies of the above process is
to use a virtually mapped cache. In
our example we would use the high order 28 bits as a virtual tag. If the addressed item is in the
cache, it is found immediately.
A Cache Miss accesses the Virtual Memory system.
The
Problem of Memory Aliasing
While the virtually mapped cache presents many advantages,
it does have one notable drawback
when used in a multiprogramming environment.
In such an environment, a computer might be
simultaneously executing more than one program.
In the real sense, only one program at a time
is allocated to any CPU. Thus, we might
have what used to be called “time
sharing”, in which
a CPU executes a number of programs in sequence.
There is a provision in such a system for two or more
cooperating processes to request use of the
same physical memory space as a mechanism for communication. If two or more processes have
access to the same physical page frame, this is called memory aliasing. In such
scenarios,
simple VM management systems will fail.
This problem can be handled, as long as one is aware
of it.
The topic of virtual memory is worthy of considerable
study. Mostly it is found in a course on
Operating Systems. The reader is
encouraged to consult any one of the large number of
excellent textbooks on the subject for a more thorough examination of virtual
memory.