Input/Output
Macros
The subject of this lecture is the Input/Output system
of the IBM 370 series.
To quote the textbook “Input/output on the 370–series
computers is
significantly complex.”
The reason for this complexity is a desire to achieve
acceptable performance
from the computing system, especially when it is running multiple jobs.
Basically there are two forms of Input/Output
processing available for use
in the design of a computer.
1. The Central Processing Unit can manage all
input/output operations.
This has the trouble of idling the CPU during long I/O operations.
2. The I/O can be separately managed by
independent hardware that is directed by
the CPU and communicates with
the CPU. IBM calls this an “I/O Channel”.
This structure frees the CPU to
do other tasks while the I/O is in process.
Those who have taken computer architecture will
remember that:
1. The I/O Channel is a special form of Direct
Memory Access I/O device, which
is a device that interacts
directly with the computer’s main memory.
2. There are several classes of I/O channels:
some for faster devices (such as disks),
and some for slower devices
(such as keyboard input).
The
Input/Output Process
At the most fundamental level, all input and output is
a cooperative process between
the Central Processing Unit and the various I/O Channels of the computer.
Input: 1. The CPU signals the I/O Channel with a request
for input.
2. The I/O Channel reads its “channel program”,
which is a sequence
of “channel commands”
that indicate what to do.
3. The I/O Channel deposits data in a buffer in the
main memory of the
computer. This buffer exists in system memory and is
accessed by the OS.
4. The I/O Channel signals the CPU that the input
has been completed.
If needed, it can send
an error code.
Output: 1. The OS
has received data from a user program and deposited the data in
a buffer in the main
system memory of the computer.
2. The OS signals the I/O Channel with a request
for output.
3. The I/O Channel reads its channel program,
which includes the address
of the memory buffer
containing the data.
4. The I/O Channel completes the output and
signals the CPU on completion.
Input/Output
in a Shared Computer
On
a large mainframe system, the input and output for each program is managed
within
the requirement to share the resources of the computer among a number of
programs.
This process is called “Time Sharing”;
it allows each user of the computer to believe
that he or she is the only one accessing the computer at that time.
In
the Time Sharing model, we have
1. A single computer with its CPU, memory, and sharable I/O resources,
2. A number of computer terminals attached to the CPU, and
3. A number of users, each of whom wants to use the computer.
In
order to share this expensive computer more fairly, we establish two rules.
1. Each user process is allocated a “time slice”, during which it can be
run.
At the end of this time, it must
give up the CPU, go to the “back of the line”
and await its turn for another
time slice.
2. When a process is blocked and waiting on
completion of either input or output,
it must give up the CPU and cannot
run until the I/O has been completed.
With
this convention, each user typically gets reasonably efficient service from
the computer. Thus the computer is “time shared”.
Users and
Supervisors
In
a modern computer system, users are commonly restricted from direct access to
the input and output devices. There are
a number of good reasons for this.
TRUE STORY: While I
was a Systems Analyst at a company in Cambridge,
I was one of two programmers who had “superuser
access” to a PDP–11 computer.
This meant that each of us could write and run programs with what IBM calls
“supervisor privilege”. As an experiment, each of us wrote a program
that output
directly to a shared printer. When run
at the same time, the two programs produced
almost nothing but illegible junk: some of his output followed by some of mine,
etc.
Neither
of us was able to produce an entire line of uninterrupted text output.
Modern
computers (including all variants of the PDP–11) solve this problem by a
process
called SPOOLing, (Simultaneous Peripheral
Operation On Line). The user
program
attempting to write to a shared printer actually writes to a disk file.
After
the program closes its output, a SPOOL program operating with supervisor
privilege, queues up the disk file for output to the printer.
IBM
terminology for the two states is supervisor and problem.
The
UNIX terminology is superuser and user.
Your User Program
Requests Input
As
noted above, your user program cannot communicate directly with
an I/O device. Thus it has to request
I/O service by the O/S on its behalf.
1. The user program creates a work area of
size sufficient to hold the input data.
2. The user program passes a request,
including the address of this work area,
to the operating system. This might be called a SVC (Supervisor Call).
NOTE: This is not the same as a
subroutine call. A subroutine operates
under
the control of the user program. These I/O routines are controlled by the O/S.
3. If the Operating System determines that the
user request is appropriate and can be
granted within the security
guidelines, it will start an Input/Output Control Program.
4. The I/O Control Program generates sets
aside a buffer in system space for the data
that will be input. It then generates a sequence of channel
commands, which are
directions to the I/O Channel of
what it to be done. It then sends a
signal to
the I/O Channel, which begins the
appropriate processing.
5. The I/O Control Program suspends itself and the Operating System
marks the user
program as “blocked, waiting for
I/O”. It then suspends the user program
and
grants the CPU to another user
program that is ready to run.
The Classis
Process Diagram
Here
is the standard process state diagram associated with modern operating systems.
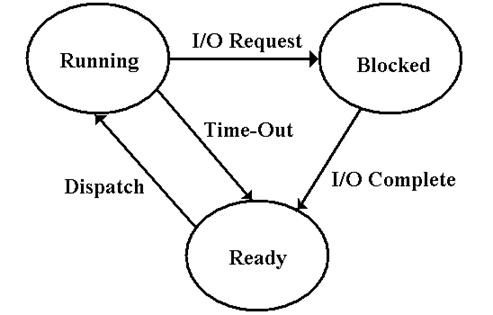
When
a process (think “user program”) executes an I/O trap instruction (remember
that it
cannot execute the I/O directly), the O/S suspends its operation & starts
I/O on its behalf.
The
job is then marked as “blocked”, awaiting completion of the I/O. Another job is run.
When
the I/O is complete, the O/S marks the process as “ready to run”. It will be
assigned to the CPU when it next becomes available.
Levels of
I/O Commands
The
goal of the I/O Macros is to isolate the programmer from the detailed control
of the Input/Output devices. Much of the
detailed code is tedious and difficult.
The
Channel Command Level can be seen as
the lowest level.
Commands at this level are all privileged and not executable by user programs.
Start I/O
Test I/O
Halt I/O
Test Channel
The
Physical I/O Level is the next
lowest level. This level initiates the
channel
commands and handles I/O interrupts, all still low–level stuff. Commands include:
EXCP Execute Channel Program
WAIT Wait for completion of the channel program
CCB Channel Control Block
The
Logical I/O Level is the one that
most user programs access to define the layout
and start both input (GET) and output (PUT).
Double
Buffering
Double buffering refers to a process that is built on the fact that
the use of
I/O Channels allows for simultaneous processing and input/output of data.
A
double buffering scheme calls for two data buffers; call them B1 and B2.
This assumes that each buffer can contain enough data to allow processing
based only on the data in that buffer.
The
process basically has two phases: a startup and a processing. Here is an
example, supposing that buffer B1 is used first.
1. Start reading data into buffer B1.
Wait on the buffer to be filled.
2. Start reading data into buffer B2.
While reading into that buffer,
process the data in buffer B1.
3. Wait on buffer B2 to be filled. Start
reading data into buffer B1.
While reading into B1, process the
data in buffer B2.
4. Go to step 2.
One
needs to be careful in order to process all of the data in the last buffer.
When the I/O completes, there is still more to do.
The IOCS and
Its Macros
Here
are the common macros used by the IBM IOCS (Input/Output Control System).
We
have mentioned a few of these in previous lectures.
DCB Data
Control Block, used to define files.
OPEN This
makes a file available to a program, for either input or output.
CLOSE This
terminates access to a file in an orderly way.
For a buffered output
approach, this
ensures that all data have been output properly.
GET This
makes a record available for processing.
PUT This
writes a record to an output file. In a
buffered output, this might
write only to an
output buffer for later writing to the file.
Usage of the
General Purpose Registers
The
operating system has special purposes for a number of these registers.
0 and 1 Logical IOCS macros, supervisor
macros, and other IBM
macros use
these registers to pass addresses.
2 The TRT (Translate and
Test) instruction uses this to store a
generated
value. This instruction is often used to
translate other
character code
sets into EBCDIC.
13 Used by logical IOCS and
other supervisory routines to hold the
address
of a save area. This area holds the
contents of the user
program’s
general purpose registers and restores them on return.
14 and 15 Logical IOCS uses these registers for
linkage. A GET or PUT
will load the
address of the following instruction into register 14
and will load
the address of the actual I/O routine into register 15.
This
use of registers 13, 14, and 15 follows the IBM standard for
subroutine
linkage, which will be discussed in a later chapter.
In
general, only registers 3 through 12 can be considered to be truly general
purpose,
with register 2 useable only if the TRT is not used.
Magnetic
Tape Units and Record Blocking
 In order to understand the standard forms of record
In order to understand the standard forms of record
organization, one must recall that magnetic tape was
often used to store data.
The standard magnetic tape was 0.5 inches wide and
either
1200 or 2400 feet in length. The tape
was wound on a
removable reel that was about 10.5 inches in diameter.
The IBM 727 and 729 were two early models.
The IBM 727 was officially announced on September 25,
1963 and marketed until May 12, 1971.
The figure at left was
taken from the IBM archives, and is used by permission.
It is important to remember that the tape drive is an
electro–
mechanical unit. Specifically, the tape
cannot be read unless it
is moving across the read/write heads.
This implies a certain
amount of inertia; physical movement can be started and
stopped quickly, but not instantaneously.
The
tape must have blank gaps between records.
Record
Blocking
The
problem with inter–record gaps is that they consume space that cannot be used
to write data. This is an inefficient
use of magnetic tape.
Consider
a sequence of small records, written one per physical block.

Space
on tape can be used more efficiently if the tape is written in blocks, each
block comprising a number of independent logical records.

If
the last physical record is not completely filled with logical records, it will
be filled with dummy records to achieve its full size.
Record
Blocking Example
Consider a set of 17 logical records written to a tape
with a blocking factor of 5.
There would be four physical records on the tape.
Physical
record 1 would contain logical records 1 – 5.
Physical
record 2 would contain logical records 6 – 10.
Physical
record 3 would contain logical records 11 – 15.
Physical
record 4 would contain logical records 16 and 17,
as well as three dummy logical records
to fill out the count to five.
Magnetic
tape is little used today for large data storage.
The
idea of record blocking persists, and has been adapted to use
on large disk structures.
Use of the
I/O Facilities
In order to use the data management facilities offered
by the I/O system, a few steps
are necessary.
The program must do the following:
1. Describe the physical characteristics of the
data to be read or written with respect
to data set organization, record
sizes, record blocking, and buffering to be used.
2. Logically connect the data set to the
program.
3. Access the records in the data set using the
correct macros.
4. Properly terminate access to the data set so
that buffered data (if any)
can be properly handled before
the connection is broken.
If the program accesses a magnetic tape, the programmer must do the following.
1. Either submit the magnetic tape with the job
or tell the computer operator
where to find the tape. The operator must mount the tape.
2. Give the operator any special instructions
for mounting the tape on the tape drive.
While some of these steps might be handled
automatically by the run–time system of a
modern high–level language, each must be executed explicitly in an assembler
program.
Standard
Style for Writing Invocations of I/O Macros
Programmers
have evolved a standard style for writing macro invocations in order to
make them easier to read. Here is an
example written in standard style.
FILEIN
DCB DDNAME=FILEIN, X
DSORG=PS, X
DEVD=DA,
X
RECFM=FB,
X
LRECL=80,
X
EODAD=A90END, X
MACRF=(GM)
Note the “X” in column 72 of
each of the lines except the last one.
This is a continuation
character indicating that the next physical line is a continuation
of the present physical line.
Note
that these seven physical lines of text form one logical line and should be
read as a single logical statement.
The File
Definition Macro
The DCB (Data Control Block) is the
file definition macro that is most commonly used
in the programs that we shall encounter.
This is a keyword macro, meaning that every argument
is passed in the form
PARAMETER=VALUE
While the parameters can be passed in any order, it is
good practice to adopt a standard
order and use that exclusively. Some
other programmer might have to read your work.
The example above shows a DCB invocation that has been
shown to work on the
particular mainframe system now being used by Columbus State University.
It has the form:
Filename DCB DDNAME=Symbolic_Name, X
DSORG=Organization, X
DEVD=Device_Type, X
RECFM=Format_Type, X
LRECL=Record_Size, X
EODAD=EOF_Address, X
MACRF=(Input_Operation)
The DCB Macro
Label
The name used as the label for the DCB is used by the
other macros in order to identify
the file that is being accessed.
Consider the following pair of lines.
Here
we see that the file being opened for input is that defined by
this specific DCB macro.
As
we shall see later, this macro expands into a large number of assembly
language instructions.
Parameters
for the DCB Macro
Filename DCB DDNAME=Symbolic_Name, X
DSORG=Organization, X
DEVD=Device_Type, X
RECFM=Format_Type, X
LRECL=Record_Size, X
EODAD=EOF_Address, X
MACRF=(Input_Operation)
DDNAME identifies the
file’s symbolic name, such as SYSIN for the primary system
input device and SYSPRINT for the primary listing device.
DSORG identifies the
data set organization. The most common
value is
PS Physical
sequential, as in a set of cards with one record per card.
DEVD defines a
particular I/O unit. The only value we
shall use is DA, which indicates
a direct access device, such as a disk.
All of our I/O will be disk oriented; even our print
copy will be sent to disk and not
actually placed on paper.
RECFM specifies the
format of the records. The two common
values are:
F Fixed length and unblocked
FB Fixed
length and blocked.
More Parameters
for the DCB Macro
Filename DCB DDNAME=Symbolic_Name, X
DSORG=Organization, X
DEVD=Device_Type, X
RECFM=Format_Type, X
LRECL=Record_Size, X
EODAD=EOF_Address, X
MACRF=(Input_Operation)
LRECL specified the length (in bytes) of the logical
record.
A
typical value would be a positive decimal number. Our programs will all assume
the use of 80–column punched cards for input, so that we set LRECL=80.
EODAD is a parameter
that is specified only for input operations.
It specifies the
symbolic address of the line of code to be executed when an end–of–file
condition
is encountered.
MACRF specifies the
macros to be used to access the records in the data set. In the case
of GET and PUT, it also specifies
whether a work area is to be used for processing the
data. The work area is a block of memory
set aside by the user program and used by the
program to manipulate the data. We use MACRF=(GM) to select the work area option.
There
are many other options.
Expansion of
the DCB Macro
Here
is a complete assembly language expansion of a single DCB. It is long.
163 FILEIN DCB
DSORG=PS,
MACRF=(GM),
DEVD=DA,
DDNAME=FILEIN,
EODAD=A90END,
RECFM=FB,
LRECL=80
166+* DATA CONTROL BLOCK
167+*
0000F8 168+FILEIN DC
0F'0' ORIGIN ON
169+* DIRECT ACCESS DE
0000F8 0000000000000000 170+
DC BL16'0' FDAD, DVTB
000108 00000000 171+ DC
A(0)
KEYLEN, DE
172+* COMMON ACCESS ME
00010C 00 173+ DC
AL1(0)
BUFNO, NUM
00010D 000001 174+ DC
AL3(1)
BUFCB, BUF
000110 0000 175+ DC
AL2(0)
BUFL, BUFF
000112 4000 176+ DC
BL2'0100000000000000' DSO
000114 00000001 177+ DC
A(1)
IOBAD FOR
178+* FOUNDATION EXTEN
000118 00 179+ DC
BL1'00000000'
BFTEK, BFA
000119 000074 180+ DC
AL3(A90END)
EODAD (END
00011C 90 181+
DC BL1'10010000' RECFM (REC
00011D 000000 182+ DC
AL3(0)
EXLST (EXI
183+* FOUNDATION BLOCK
000120 C6C9D3C5C9D54040 184+
DC CL8'FILEIN' DDNAME
000128 02 185+ DC
BL1'00000010'
OFLGS (OPE
000129 00 186+ DC
BL1'00000000'
IFLGS (IOS
00012A 5000 187+ DC
BL2'0101000000000000' MAC
188+* BSAM-BPAM-QSAM I
00012C 00 189+ DC
BL1'00000000'
OPTCD, OPT
00012D 000001 190+ DC
AL3(1)
CHECK OR I
000130 00000001 191+ DC
A(1)
SYNAD, SYN
000134 0000 192+ DC
H'0' INTERNAL A
000136 0000 193+ DC
AL2(0)
BLKSIZE, B
000138 00000000 194+ DC
F'0' INTERNAL A
00013C 00000001 195+ DC
A(1)
INTERNAL A
196+* QSAM INTERF
000140 00000001 197+ DC
A(1)
EOBAD
000144 00000001 198+ DC
A(1)
RECAD
000148 0000 199+ DC
H'0' QSWS (FLAG
00014A 0050 200+ DC
AL2(80)
LRECL
00014C 00 201+ DC
BL1'00000000'
EROPT, ERR
00014D 000001 202+ DC
AL3(1)
CNTRL
000150 00000000 203+ DC
H'0,0'
RESERVED A
000154 00000001 204+ DC
A(1)
EOB, INTER