NUMOUT: The Newer
Version
The newer version of NUMOUT will
be written in the style required for recursive subroutines, although it will
not be recursive.
This style requires explicit management of the return address. This requires
the definition of a label for the instruction following
the call to NUMOUT. For no particular
reason, this statement is called NUMRET.
MVC
PRINT,BLANKS CLEAR THE OUTPUT BUFFER
LA 8,NUMRET STATEMENT AFTER NUMOUT
STKPUSH
R8,R PLACE ADDRESS ONTO STACK
B NUMOUT BRANCH DIRECTLY TO NUMOUT
NUMRET
MVC DATAPR,THENUM AND COPY TO
THE PRINT AREA
Here is the new code for NUMOUT.
NUMOUT CVD R4,PACKOUT CONVERT TO PACKED
UNPK THENUM,PACKOUT PRODUCE
FORMATTED NUMBER
MVZ THENUM+7(1),=X’F0’ CONVERT SIGN
HALF-BYTE
STKPOP
R8,R POP THE RETURN ADDRESS
BR 8 RETURN ADDRESS IN R8
Factorial: A Recursive Function
One of the standard examples of
recursion is the factorial function. We
shall give its standard recursive definition and
then show some typical code.
Definition: If N £ 1,
then N! = 1
Otherwise N! = N·(N – 1)!
Here is a typical programming language definition of the factorial function.
Integer Function FACT(N : Integer)
If N £ 1 Then Return 1
Else Return N*FACT(N –
1)
Such a function is easily
implemented in a compiled high–level language (such as C++
or Java) that provides a RTS (Run Time System) with native support of a
stack. As we shall see, a low–level
language,
such as IBM 370 assembler, must be provided with explicit stack handling
routines if recursion is to be implemented.
Tail Recursion and
Clever Compilers
Compilers for high–level
languages can generally process a construct that is “tail recursive”, in which the recursive call
is the last executable statement. Consider
the above code for the factorial function.
Integer Function FACT(N : Integer)
If N £ 1 Then Return 1
Else Return N*FACT(N – 1)
Note that the recursive call is the last statement executed when N > 1.
A good compiler will turn the code into the following, which is equivalent.
Integer Function FACT(N : Integer)
Integer F = 1 ; Declare a
variable and initialize it
For
(K = 2, K++, K <= N) Do F = F*K ;
Return F ;
This iterative code consumes
fewer RTS resources and executes much faster.
NOTE: For fullword (32–bit integer) arithmetic, the biggest we can calculate is
12!
A Pseudo–Assembler Implementation with Problems
We want an implementation of the
factorial function. It takes one
argument and returns one value. We shall
attempt
an implementation as FACTOR, with each of the argument and
result being passed in register R4 (my favorite). It might be called as follows.
L
4,THEARG
BAL 8,FACTOR
N1 ST
4,THERESULT
Pseudocode for the function might appear as follows.
If (R4 £ 1) Then
L R4, = F’1’ SET R4 EQUAL TO 1
A1 BR
8 RETURN TO CALLING ROUTINE
Else
LR 7,4 COPY R4 INTO R5
S 4,=F’1’
BAL 8,FACTOR
N2
MR 6,4 MULTIPLY
A2 BR 8
This code works only for N £ 1.
Confusion with the
Return Addresses
Suppose that FACTOR is called with N = 1. The following code executes.
L 4,=F’1’
BAL 8,FACTOR The first call to
FACTOR
N1 ST
4,THERESULT
If (R4 £ 1) then the function code is invoked. This is all that happens.
L R4, = F’1’ SET R4 EQUAL TO 1
A1 BR 8 RETURN TO CALLING ROUTINE
But note at this point, register 8 contains the address N1. Return is normal.
Suppose now that FACTOR is called with N = 2.
L 4,=F’2’
BAL 8,FACTOR PLACE A(N1) INTO R8
N1
ST 4,THERESULT
This code is executed.
LR 7,4 COPY R4 INTO R5
S 4,=F’1’
BAL 8,FACTOR PLACE A(N2) INTO
R8
N2
MR 6,4 MULTIPLY
A2 BR 8
The above call causes the following code to execute, as N = 1 now.
L R4, = F’1’ SET R4 EQUAL TO 1
A1 BR 8 RETURN TO CALLING ROUTINE
Here is the trouble. For N = 1, the return is OK.
Back at the invocation for N = 2. Compute 2·1 = 2.
Try to return to N1. But R8 contains the address N2.
The code is “trapped within FACTOR”. It can never return to the main program.
Outline of the Solution
Given the limitations of the IBM
370 original assembly language, the only way to implement recursion is to
manage the return addresses ourselves. This
must be done by explicit use of the stack.
Given that we are
handling the return addresses directly, we dispense with the BAL instruction
and use the unconditional branch instruction, B.
Here is code that shows the use
of the unconditional branch instruction.
At this point, register R4 contains the argument.
LA R8,A94PUTIT ADDRESS OF
STATEMENT AFTER CALL
STKPUSH R8,R PUSH THE ADDRESS
ONTO THE STACK
STKPUSH R4,R PUSH THE ARGUMENT
ONTO THE STACK
B DOFACT CALL THE SUBROUTINE
A94PUTIT BAL 8,NUMOUT FINALLY, RETURN HERE.
Note that the address of the
return instruction is placed on the stack.
Note also that the return target uses the
traditional subroutine call mechanism. In this example, the goal is to focus on
recursion in the use of the DOFACT
subprogram. For NUMOUT, we shall use the
standard subroutine linkage based on the BAL instruction.
Proof of Principle: Code Fragment 1
Here is the complete code for
the first proof of principle. The
calling code is as follows.
The function is now called DOFACT.
LA R8,A94PUTIT ADDRESS OF
STATEMENT AFTER CALL
STKPUSH R8,R PUSH THE ADDRESS
ONTO THE STACK
STKPUSH R4,R PUSH THE ARGUMENT
ONTO THE STACK
B DOFACT CALL THE SUBROUTINE
A94PUTIT BAL 8,NUMOUT FINALLY, RETURN HERE.
The first test case was designed with a stub for DOFACT. This design was to prove the return
mechanism.
The code for this “do nothing” version of DOFACT is as follows.
DOFACT
STKPOP R4,R POP RESULT BACK
INTO R4
STKPOP R8,R POP RETURN ADDRESS
INTO R8
BR 8 BRANCH TO THE POPPED ADDRESS
Remember: 1. STKPOP R4,R is a macro invocation.
2. The
macros have to be written with a symbolic parameter as
the
label of the first statement.
The Stack for Both
Argument and Return Address
We now examine a slightly
non–standard approach to using the stack to store both arguments to the function
and the return address. In general, the
stack can be used to store any number of arguments to a function or
subroutine. We need only one argument,
so that is all that we shall stack.
Remember that a stack is a Last In / First Out data structure.
It could also be called a First In / Last Out data structure; this is seldom done.
Recall the basic structure of the function DOFACT. Here is the skeleton.
DOFACT
Use the argument from the stack
STKPOP R8,R POP RETURN ADDRESS
INTO R8
BR 8 BRANCH TO THE POPPED ADDRESS
Since the return address is the
last thing popped from the stack when the routine returns,
it must be the first thing pushed onto the stack when the routine is being
called.
Basic Structure of
the Function
On entry, the stack has both the
argument and return address. On exit, it
must
have neither. The return address is
popped last, so it is pushed first.
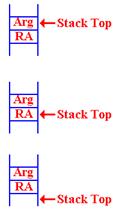
On entry to the routine, this
is the status of the stack. By “Stack Top”, I indicate the
location of the last item pushed.
At some point, the argument must
be popped from the stack, so that the Return Address
is available to be popped.
STKPOP 8 Get
the return address
BR 8
Go there
Note that the contents of the
stack are not removed. This is in line
with standard stack
protocol, though it might have some security implications.
When Do We Pop the
Argument?
The position of the STKPOP
depends on the use of the argument sent to the function. There are two considerations,
both of which are quite valid. Assume
that register R7 contains the argument.
We shall get it there on the next slide.
Consider the fragment of code corresponding to N·FACT(N – 1).
FDOIT
LA 8,FRET GET THE ADDRESS OF RETURN
STKPUSH R8,R STORE NEW RETURN ADDRESS
STKPUSH R7,R NOW, PUSH NEW ARG ONTO STACK
B DOFACT MAKE RECURSIVE
CALL
FRET L R2,=F'0'
At this point, the return register (say R4) will contain FACT(N – 1).
At this point, the value of N
should be popped from the stack and multiplied by the result
to get the result N·FACT(N
– 1), which will be placed into R4 as the return value. But recall that the basic
structure of the factorial function calls for something like:
STKPOP R7,R
If the value in R7 is not greater than 1, execute this code.
L R4,=F’1’ SET THE RETURN VALUE TO 1
STKPOP R8,R POP THE RETURN
ADDRESS
BR 8 RETURN TO THE CALLING ROUTINE.
If the value in R7 is larger than 1, then execute this code.
FDOIT
LA 8,FRET GET THE ADDRESS OF RETURN
STKPUSH R8,R STORE NEW RETURN ADDRESS
STKPUSH R7,R NOW, PUSH NEW ARG ONTO STACK
B DOFACT MAKE RECURSIVE
CALL
FRET L R2,=F'0'
But, there is only one copy of the argument value. How can we pop it twice.
Answer: We push it back onto the stack.
Examining the Value
at the Top of the Stack
Here is the startup code for the function DOFACT.
DOFACT
L R2,=F'0'
STKPOP R7,R GET THE ARGUMENT AND EXAMINE
STKPUSH R7,R BUT PUT IT BACK ONTO THE STACK
C R7,=F'1' IS THE ARGUMENT BIGGER THAN 1
BH
FDOIT YES, WE HAVE A
COMPUTATION
This code fragment shows the strategy for examining the top
of the stack without removing the value:
just pop it and push it back onto the stack.
There is another common way of examining the top of the s
tack. Many stack implementations use a
function STKTOP, which returns the value at the stack top
without removing it. We shall not use
this option.
This is another valid option. That code could be written as follows.
DOFACT
L R2,=F'0' SET R2 TO ZERO
STKTOP R7,R GET THE ARGUMENT VALUE
C R7,=F'1' IS THE
ARGUMENT BIGGER THAN 1
BH
FDOIT YES, WE HAVE A
COMPUTATION
The Factorial Function DOFACT
Here is the code for the recursive version of the function DOFACT.
DOFACT
STKPOP R7,R GET THE ARGUMENT AND EXAMINE
STKPUSH R7,R BUT PUT IT BACK ONTO THE STACK
C R7,=F'1' IS THE
ARGUMENT BIGGER THAN 1
BH FDOIT YES, WE HAVE A COMPUTATION
L R4,=F'1' NO, JUST
RETURN THE VALUE 1
STKPOP R7,R ARG IS NOT USED, SO POP IT
B FDONE AND
RETURN
FDOIT
LA 8,FRET GET THE ADDRESS OF RETURN
STKPUSH R8,R STORE NEW RETURN ADDRESS
STKPUSH R7,R NOW, PUSH NEW ARG ONTO STACK
B DOFACT MAKE RECURSIVE
CALL
FRET
STKPOP R7,R POP THIS ARGUMENT FROM STACK
MR 6,4 PUT R4*R7 INTO
(R6,R7)
LR 4,7 COPY PRODUCT
INTO R4
FDONE
STKPOP R8,R POP
RETURN ADDRESS FROM STACK
BR 8 BRANCH TO THAT ADDRESS
Analysis of DOFACT
Let’s start with the code at the
end. At this point, the register R4
contains the return value of the
function, and the argument has been removed from the stack.
FDONE
STKPOP R8,R POP RETURN ADDRESS FROM STACK
BR 8 BRANCH TO THAT ADDRESS
The label FDONE is the common target address for the two cases discussed above.
Again, here is the top–level structure.
1. Get the argument value, N, from the stack.
2. If ( N £ 1 ) then
Set the return
value to 1
B FDONE
3. If ( N ³ 2) then
Handle the
recursive call and return from that call.
4. FDONE: Manage the return from the function
DOFACT Part 2: Handling
the Case for N £ 1
Here is the startup code and the code to return the value for N £ 1.
DOFACT
STKPOP R7,R GET THE ARGUMENT AND EXAMINE
STKPUSH R7,R BUT PUT IT BACK ONTO THE STACK
C R7,=F'1' IS THE ARGUMENT
BIGGER THAN 1
BH FDOIT YES, WE HAVE A COMPUTATION
*
* N = 1
L R4,=F’1’ NO, JUST RETURN
THE VALUE 1
STKPOP R7,R ARG IS NOT USED, SO POP IT
B FDONE AND RETURN
The startup code uses STKPOP
followed by STKPUSH to get the argument value into register
R7 without removing it from the stack. That
value is then compared to the constant 1. If the argument
has value 1 or less, the return value is set at 1. Note that the argument is still on the
stack. It must be popped so
that the return address will be at the
top of the stack and useable by the return code at FDONE.
DOFACT Part 3:
Handling the Case for N > 1
Here is the code for the case N > 1.
FDOIT
LA
8,FRET GET THE ADDRESS OF
RETURN
STKPUSH R8,R STORE NEW RETURN ADDRESS
STKPUSH R7,R NOW, PUSH NEW ARG ONTO STACK
B DOFACT MAKE RECURSIVE
CALL
FRET
L R2,=F'0'
STKPOP R7,R POP THIS ARGUMENT
FROM STACK
*HERE
*
R7 CONTAINS THE VALUE N
*
R4 CONTAINS THE VALUE FACT(N – 1)
*
MR 6,4 PUT R4*R7 INTO
(R6,R7)
LR 4,7 COPY PRODUCT INTO R4
The code then falls through to
the “finish up” code at FDONE. Note the
structure of multiplication.
Remember that an even–odd register pair, here (6, 7) is multiplied by another
register.
Sample Run for DOFACT
We shall now monitor the state
of the stack for a typical call to the recursive function DOFACT.
Here is the basic structure for the problem.
First we sketch the calling code.
LA
8,A1 STATEMENT AFTER CALL TO
SUBROUTINE
STKPUSH R8,R PLACE RETURN ADDRESS ONTO STACK
B
DOFACT BRANCH DIRECTLY TO
SUBROUTINE
A1 The next instruction.
Here is the structure of the recursive function DOFACT
DOFACT Check
value of argument
Branch
to FDONE if the argument < 2.
Call
DOFACT recursively
FRET Return
address for the recursive call
FDONE
Close–up code for the subroutine
More on the Stack
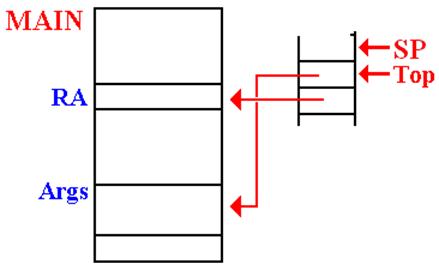
We now relate the idea of the Stack Top to our use of the SP (Stack Pointer).
The protocol used for stack management is called “post increment on push”.
In a high level programming language, this might be considered as follows.
PUSH ARG M[SP] = ARG POP
ARG SP = SP – 1
SP = SP + 1 ARG
= M[SP]
 The
status of the stack is always that the SP points to the location into
The
status of the stack is always that the SP points to the location into
which the next item pushed will be placed.
On entry to the function, there
is an argument on the top of the
stack. The return address is the value
just below the argument.
When the argument is popped from
the stack, we are left with the SP pointing
to the argument value that has just been popped. The return address (RA) is now
on the stack top and available to be popped.
After the RA has been popped,
the SP points to its value.
Whatever had been on the stack is now at the Stack Top.
Consider DOFACT For
the Factorial of 3
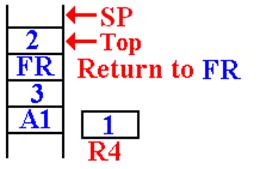
Remember our
notation for return addresses: A1 for the calling routine.
FR for the return in DOFACT.
 This
is the status of the stack when DOFACT is first called.
This
is the status of the stack when DOFACT is first called.
The return address (A1) of the
main program was pushed
first, and then the value (3) was pushed.
The value in R4, used for the return value, is not important.
It is noted that 3 > 1 so
DOFACT will be called with a value
of 2. When the first recursive call is
made, the stack status is
shown at left. The top of the stack has
the value 2.
The return address (FR) of the DOFACT function was
first pushed, followed by the argument value.
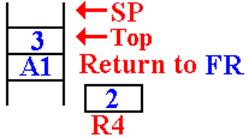
The Next Recursive
Call To DOFACT
On the next call to DOFACT, the value at the top of the stack is found to be 2.
 It
is noted that 2 > 1.
It
is noted that 2 > 1.
The argument value for the next
recursive call is computed,
and made ready to push on the stack.
The return address (FR) for
DOFACT is pushed onto the stack.
Then the value of the new argument (1) is pushed onto the stack.
DOFACT is called again.
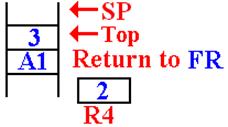
In this next call to DOFACT,
the value at the top of the stack is
examined and found to be 1.
A return value is placed into
the register R4, which has been
reserved for that use.
This is the status of the stack just before the first return.
It will return to address FRET in the function DOFACT.
The First Recursive
Return
The first recursive return is to
address FR (or FRET) in DOFACT.
Here is the situation just after the first recursive return.
The argument value for this
invocation is
now at the top of the stack.
 The
value 2 is removed from the stack, multiplied
The
value 2 is removed from the stack, multiplied
by the value in R4 (which is 1) and then stored in R4.
The return address (FR) had
been popped from the
stack. The function returns to itself.
The Next Recursive Return
The next recursive return is to address FR (or FRET) in DOFACT.
Here is the situation just after the first recursive return.
 Here
is the status of the stack after this
Here
is the status of the stack after this
return. The argument value is on the top
of the stack, followed by the return address
for the main routine.
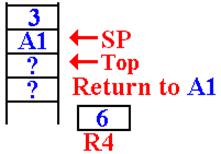 On
the final return, the value 3 has been removed
On
the final return, the value 3 has been removed
from the stack, multiplied by the value in R4, and
the new function value (6) is placed back into R4.
The return address (A1) has
been popped from the
stack and the function returns there.
The Subroutine
Linkage Problem
When a subroutine or function is
called, control passes to that subroutine but must return
to the instruction immediately following the call when the subroutine
exits. There are two main issues in the
design
of a calling mechanism for subroutines and functions. These fall under the heading “subroutine linkage”.
1. How
to pass the return address to the subroutine so that, upon completion,
it returns to the correct
address. We have just discussed this
problem.
2. How to pass the arguments to the subroutine and return values from it.
A function is just a subroutine
that returns a value. For functions, we
have one additional
issue in the linkage discussion: how to return the function value. This presentation will be a bit historical in
that it will
pose a number of linkage mechanisms in increasing order of complexity and
flexibility. We begin with a simple
mechanism based on early CDC–6600 FORTRAN compilers.
Pass–By–Value and
Pass–By–Reference
Modern high–level language
compilers support a number of mechanisms for passing
arguments to subroutines and functions.
These can be mimicked by an assembler.
Two of the most common mechanisms are:
1. Pass by value, and
2. Pass by reference.
In the pass–by–value mechanism,
the value of the argument is passed to the subroutine. In the pass–by–reference,
it is the address of the argument that is passed to the subroutine,
which can then modify the value and return the new value. Suppose that we want to use register R10 to
pass an
argument to a subroutine. That argument
is declared as follows.
FW1 DC F‘35’
The operative code would be as follows:
Pass by value: L R10,FW1 Load the value at FW1
Pass by reference: LA R10,FW1 Load the address of FW1
Returning Function
Values
There is a simple solution here that is motivated by two facts.
1. The function stores its return value as its last step.
2. The first thing the calling code should do is to retrieve that value.
This
simple solution is to allocate one or more registers to return function
values. There seem to be no drawbacks
to this mechanism. As we have seen
above, it works rather well with recursive functions. The solution used in
these lectures was to use R7 to return the value.
The CDC–6600 FORTRAN solution was to use one or two registers as needed.
Register
R7 would return either a single–precision
result or the
low–order bits of
a double–precision result.
Register R6 would return the high–order bits of the double–precision result.
CDC Nerds note that the actual register names are X6 and X7.
Argument Passing:
Version 1 (Based on Early CDC–6400
FORTRAN)
Pass the arguments in the
general–purpose registers. Here we use
the actual names of the registers: X0 through X7.
Register X0 was not used for a reason that I cannot remember.
Registers X1 through X5 are used to pass five arguments.
Registers X6 and X7 are used to return the value of a function.
This is a very efficient
mechanism for passing arguments. The
problem arises when one wants more than five arguments
to be passed. There is also a severe
problem in adapting this scheme to recursive subroutines. We shall not discuss this
at present for two reasons.
1. We shall meet the identical problem later, in a more general context.
2. None of the CDC machines was designed to support recursion.
Argument Passing: Version 2 (Based on Later CDC–6400 FORTRAN)
In this design, only two values are placed on the stack. Each is an address.
The return address.
The address of a memory block containing the number of
arguments
and an entry (value or
address) for each of the arguments.
This method allows for passing a large number of arguments.
This method can be generalized to be compatible with the modern stack–based protocols.
Example Code Based on
CDC–6600 FORTRAN
Here is IBM/System 370 assembly
language written in the form that the CDC FORTRAN compiler might have
emitted. Consider a function with three
arguments. The call in assembly language
might be.
LA R8,FRET
ADDRESS OF STATEMENT TO BE
EXECUTED
NEXT.
STKPUSH
R8,R PLACE ADDRESS ONTO STACK
LA R8,FARGS LOAD ADDRESS OF ARGUMENT BLOCK
STKPUSH
R8,
B THEFUNC
BRANCH DIRECTLY TO SUBROUTINE
A0 DC
F‘3’ THE NUMBER OF ARGUMENTS
A1 DS
F HOLDS THE FIRST ARGUMENT
A2 DS
F HOLDS THE SECOND
ARGUMENT
A3 DS
F HOLDS THE THIRD ARGUMENT
FRET
The instruction to be executed on return.
This cannot be used with recursive subroutines or functions.
The Solution: Use a Stack for Everything
We now turn our attention to a
problem associated with writing a compiler.
The specifications for the high–level language
state that recursion is to be supported, both for subroutines and functions. It is very desirable to have only one mechanism
for subroutine linkage. Some
architectures, such as the VAX–11/780 did support multiple linkages, but a
compiler writer
would not find that desirable. Software
designers who write compilers do not like a complex assembly language; they
want simplicity.
We have a number of issues to consider:
1. How to handle the return address. This, we have discussed.
2. How to handle the arguments passed to the subroutine or function.
We have just mentioned this one.
3. How to handle the arguments and values local to the subroutine or function.
The answer is simple: put everything on the stack.
Summary of Our Approach to Recursion
Here is
an approach to recursive programming that is in step with the current practice. First, we note that all recursive programming
is to be written in a high–level language; thus, the generation of the actual
recursive code will be the job of a sophisticated compiler.
Consider a function call, such as Y = F1(A, B, C).
1. The compiler will generate code to push the return address onto the stack.
2. The
compiler will generate code to push the arguments on the stack. Either order,
left to right or right to
left is probably OK, but it must be absolutely consistent.
3. Optionally, the compiler generates code to push the argument count onto the stack.
4. The compiler will
have a convention for use of registers to hold return values.
This might be R4 for 16–bit
and 32–bit integers, the register pair (R4, R5) for
64–bit integers, and
floating–point register 0 for real number results.
Mathematical Functions and Subroutines
We now
consider a problem that occurs mostly in scientific programming and
occasionally in business programming.
This is the
evaluation of some of the standard functions, such as sine, cosine, logarithm,
square root, etc.
There are two significant problems to be discussed.
1. The
fact that the basic arithmetic instruction set of any computer includes only
the four basic operations:
addition, subtraction, multiplication, and division.
2. The
fact that no algorithm can be devised to produce the exact value of one of
these functions applied to
an arbitrary input value.
A
detailed discussion of our approach to addressing these difficulties is based
on some results from Intermediate
Calculus. In this discussion, these
results will only be asserted and not justified. One should study the Calculus in
order to fully appreciate our reasoning
here.
Definition of an
algorithm:
An algorithm is a sequence of unambiguous instructions for solving a
problem.
The full definition must include the provision that the algorithm terminate for
any
valid input. So we have the following
definition of algorithm.
Definition: An algorithm is a finite set of
instructions which, if followed, will accomplish a particular task.
In addition every algorithm must satisfy the following criteria:
i) input: there
are zero or more quantities which are externally supplied;
ii) output: at
least one quantity is produced;
iii) definiteness: each instruction must be clear and unambiguous;
iv) finiteness: if we trace out the instructions of the algorithm, then
for
all
valid cases the algorithm will terminate after a finite
number
of steps;
v) effectiveness: every instruction must be sufficiently basic that it can in
principle
be carried out by a person using only a pencil and
paper. It is not enough that each operation be
definite as in
(iii),
but it must be feasible. [page 2, R_26]
The effectiveness criterion
might be restated as it being possible to map each step in the algorithm to a
simple
instruction in the assembler language. In
particular, only the basic steps of addition, subtraction, multiplication
and division may be used in the algorithm.
Admittedly, there are manual
procedures for other processes, such as taking the square root of an integer,
but
these are based on the four primitive algebraic operations.
Sample Problems
In order to illustrate a variety of system subprograms, your author has chosen the following.
1. Raising a real number to an integer power.
2. Computation of the cosine of an angle given in radian measure.
3. Computation of the square root of a non–negative real number.
In each
of these cases, we shall first discuss the algorithm to be used by giving a
description in a high–level
language. We then proceed to give the
basis of a function, written in IBM
System 370 assembler language. As often
is the case, certain necessary features related to linkage to and
from the calling program will be omitted.
Integer Exponentiation
We first
consider the problem of raising a real number to an integer power. Unlike the more general problem
of raising a number to a real–number power (say X2.817), this
procedure can be completed using only the basic
operations of addition and multiplication.
The only
issue to be addressed in the discussion of this problem is that of the time
efficiency of the computation.
System programmers must pay particular attention to efficiency issues.
The basic
problem is to take a real number A and compute F(A, N) = AN for N
≥ 0. The simplest algorithm is
easy
to describe, but not very efficient for large values of N. In terms commonly used for algorithm
analysis,
this is called a “brute force” approach.
Brute Force
Function F(A, N)
R = 1 //
R = Result, what a brilliant name!
For K = 1 to N Do
R = R * A
End Do
Return R
In assaying the computational
complexity of this procedure, we note that the number of multiplications is a
linear
function of the exponent power; specifically N multiplications are required in
order to compute the Nth power of
a real number. Any competent system
programmer will naturally look for a more efficient algorithm.
We now present a more time-efficient algorithm to compute F(A, N) = AN for N ≥ 0.
This
algorithm is based on representation of the power N as a binary number. Consider the computation of A13.
In 4-bit binary, we have 13 = 1101 = 1·8 + 1·4 + 1·2 + 1·1. What we are saying is that A13 = A8·A4·A2·A1.
Our new algorithm is based on this observation.
Function F(A, N)
R = 1
AP = A // AP is a to the power P
While (N > 0) Do
NR = N mod 2
If NR = 1 Then R = R * AP
AP = AP * AP
N = N / 2 // Integer division: 1/2 = 0.
End While
Return R
One can show that the time complexity of
this algorithm is log2(N).
The implementation of this algorithm in assembler
language appears simple and straightforward.
The efficient implementation of this algorithm takes a bit more thought,
but not much.
In our studies of algorithm analysis and
design, we identify and count the primary operations in any algorithm. Here
the key operations appear to be multiplication and division. In actual systems programming, we must pay
attention to
the amount of time that each operation takes in order to execute;
multiplication and division are costly in terms of time.
Can we replace either operation with a faster, but equivalent, operation?
As the multiplication involves arbitrary
real numbers, there is nothing to do but pay the time cost and be happy that
the
number of these operations scales as log2(N) and not as N. But note that the division is always of a
non–negative
integer by 2. Here we can be creative.
Consider the following code fragment, adapted
from the algorithm above. Without changing
the effect of the code,
we have rewritten it as follows.
NR = N mod 2
N = N / 2 // Integer division: 1/2 = 0.
If NR = 1 Then R = R * AP
AP = AP * AP
What we shall do in our implementation is
replace the integer division by a logical right shift (double precision), using
an
even–odd register pair. Let us assume
that the integer power for the exponentiation is in R4, the even register of
the
even–odd pair (R4, R5). Here is the
code.
SR
R5,R5 // Set register R5 to
0.
SRDL R4,1 // Shift right by 1 to divide by 2
CH
R5,=H‘0’ // Is the old value
of R4 even?
BE
ISEVEN // N mod 2 was 0.
MDR
F2,F4 // R = R * AP
ISEVEN MDR
F4,F4 // AP = AP * AP
Let’s write a bit more of the code to see
the basic idea of the algorithm. We all
know that any number raised to the power 0
gives the value 1; here we say AN = 1, if N £ 0. The only general implementation of the
algorithm will use the floating–point
multiplication operator; here I arbitrarily choose the double–precision
operator MDR.
Here are the specifications for the
implementation.
On entry Integer register R4
contains the integer power for the exponentiation.
Floating point
register 2 contains the number to be raised to the power.
On exit Floating point register 0 contains the answer.
Here is a code fragment that reflects the
considerations to this point. In this
code fragment, I assume that I have used the equate to set
F0
to 0,
F2
to 2,
F4
to 4,
and F6
to 6,
in the same manner in which the R symbols were equated to integer
register numbers.
LD
F0,=D‘0.0’ // Clear floating
point register 0
CD
F2,=D‘0.0’ // Is the argument
zero?
BE DONE
// Yes, the answer is zero.
LD
F0,=D‘1.0’ // Default answer is
now 1.0
LDR
F4,F2 // Copy argument into
FP register 4
CH R4,=H‘0’ // Is the integer power positive?
BLE
DONE // No, we are done.
SR
R5,R5 // Set register R5 to
0.
SRDL R4,1 // Shift right by 1 to divide by 2
CH
R5,=H‘0’ // Is the old value
of R4 even?
BE
ISEVEN // N mod 2 was 0.
MDR
F2,F4 // R = R * AP
ISEVEN MDR
F4,F4 // AP = AP * AP
All we have to do now is to put this within a loop structure. Here is what we have.
POWER LD
F0,=D‘0.0’ // Clear floating
point register 0
CD
F2,=D‘0.0’ // Is the argument
zero?
BE DONE
// Yes, the answer is zero.
LD
F0,=D‘1.0’ // Default answer is
now 1.0
LDR
F4,F2 // Copy argument into
FP register 4
TOP CH R4,=H‘0’ // Is the integer power positive?
BLE
DONE // No, we are done.
SR
R5,R5 // Set register R5 to
0.
SRDL R4,1 // Shift right by 1 to divide by 2
CH
R5,=H‘0’ // Is the old value
of R4 even?
BE
ISEVEN // N mod 2 was 0.
MDR
F2,F4 // R = R * AP
ISEVEN MDR
F4,F4 // AP = AP * AP
B
TOP // Go back to the top
of the loop
DONE BR
R14 // Return with
function value.
Again, we should note that the
provision for proper subroutine linkage in the above code is minimal and does
not meet
established software engineering standards.
All we need is a provision to save and restore the registers used in
this
calculation that were not set at the call.
Before we move to consideration of the
common algorithm for computing the square root of an arbitrary number, we
shall consider the more general problem of raising a number (real or integer)
to an arbitrary real power. This is
significantly
more difficult that that of raising a number to an integer power, or to a
specific rational–number power such as ½.
Let A be an arbitrary positive
number. Specifically, its value is not
zero. We consider the
problem of computing F(A, X) = AX, where X is an arbitrary real
number. The general way is based on
logarithms
and exponents. Because the values are
more easily computed, most implementations use natural logarithms and
the corresponding exponentiation.
Let B = ln(A), the natural logarithm of A.
Then AX = (eB)X
= e(BX), where e » 2.71818, is the base for the natural logarithms. Thus,
the basic parts of the general exponentiation algorithm are as follows.
1. Get rid of the obvious cases of A = 0.0 and X
= 0.0.
Decide how to handle A <
0.0, as the following assumes A > 0.0.
2. Take the natural logarithm of A; call it B = ln(A).
3. Multiply that number by X, the power for the exponentiation.
4. Compute e(BX), and this is the
answer. Note that there is a well–known
algorithm
based on simple results from
calculus to compute e to any power.
If it makes sense, adjust for
the sign of A.
The point here is that the general
exponentiation problem requires invocation of two fairly complex system
routines,
one to calculate the natural logarithm and one to compute the value of e(BX). This is much slower than the computation
of an integer power. Remember that fact
when writing high–level languages that require exponentiation.
Evaluating Transcendental Functions
We now
discuss one standard way of computing the value of a transcendental function,
given the restriction that only
the basic four mathematical operations (addition, subtraction, multiplication,
and division) may be used in the
implementation of any algorithm.
This
standard way consists of computing an approximation to the result of an
infinite series. In effect, we sample a
moderately large number of terms from the infinite sequence, sum these terms,
and arrive at a result that has acceptable
precision. As noted above, the only way
to view evaluation of an infinite series as an algorithm is to state a required
precision.
Here are
some of the common infinite series representations of several transcendental
functions. Each series can be
derived by use of a number of standard calculus techniques. The basic idea here is that of convergence,
which denotes
the tendency of an infinite series to approach a limiting value, and do so more
exactly as the number of terms evaluated increases.
In more
precise terms, consider a function F(X) which can be represented by the
infinite series
F(X) = T0(X) + T1(X) + T2(X) + …. + TN(X)
+ …, representing the true function value.
Define FN(X) = T0(X) + T1(X) + T2(X)
+ …. + TN(X) as that value obtained by the summation of
the first (N + 1) terms of the infinite series.
A series is
said to converge if for any positive number e > 0 (representing a desired accuracy), we can
find an integer
N0 such that for all N > N0, we have |F(X) – FN(X)|
< e. There are a few equivalent ways to state this
property; basically
it states that for any realistic precision, one is guaranteed that only a
finite number of the terms of the infinite series must
be evaluated. For the trigonometric
functions, the input must be in radians (not degrees).
SIN(X) = X
– X3/3! + X5/5! – X7/7! + X9/9! –
….+ (–1)
COS(X) = 1
– X2/2! + X4/4! – X6/6! + X8/8! –
….+ (–1)
EXP(Z) = 1 + Z + Z2/2! + Z3/3! + Z4/4! + …. + ZN/N! + ….
LN(1+Z) = Z
– Z2/2 + Z3/3 – Z4/4 + …. – (–Z)N/N + …
Here either Z = 1 or |Z| <
1. Otherwise, the series is not useful.
Consider
the problem of evaluating the sine of an angle.
Here are a few of the well–known values:
SIN(0°)
= 0.00, SIN(90°)
= 1.00, SIN(180°)
= 0.00,and SIN(–90°)
= –1.00. As noted just above, the
formulae are
specific to computations for angles in radians.
For this reason, some systems offer trigonometric functions in
pairs.
For the sine computation, we may have
SIN(q) sine of the angle, which is expressed in radians, and
Given an
angle in degrees, the first thing that any computation will do is to convert
the angle to equivalent radian measure.
The one exception to that would be first to translate the angle into the range –180° £ q £ 180°, by
repeated additions or
subtractions of 360°. It is a well known property of all
trigonometric functions that, given any integer N (positive, negative,
or 0) and angle q
expressed in degrees, we have F(q) = F(q + N·360) = F(q – N·360). There may
be some numerical
advantage to doing this conversion on the degree measure.
The next
step, when handling an angle stated in degrees is an immediate conversion to
radian measure. As 180° = p
radians, we multiply the degree measure of an angle by
(p
/ 180) »
0.0174 5329 2519 9432 9576 9237 to convert to radian measure.
Given an
angle in radian measure, the first step would be to convert that measure into
the standard range –p
£
q
£
p,
by repeated additions or subtractions of p. This follows the property stated above for
trigonometric functions:
F(q)
= F(q
+ 2·N·p) =
F(q
– 2·N·p).
The attentive reader will note that each “standard range” listed above has an
overlap at its ends; basically –180° and 180°
represent the same angle, as do –p and p.
Once
the angle is expressed in radians and given by a measure in the standard range,
which
is –p
£
q
£
p,
the next step in computation of the sine is to reduce the range to the more
by adapting the standard formula for SIN(X ± Y), which is
SIN(X ± Y) = SIN(X)·
SIN(p/2 – q) = SIN(p/2)·COS(q) –
= 1·COS(q) – 0·SIN(q) =
COS(q);
also COS(p/2
– q)
= SIN(q).
SIN(q – p/2) = SIN(q)·COS(p/2) –
= SIN(q)·0 –
SIN(p – q) = SIN(p)·COS(q) –
= 0·COS(q) –
(–1)·SIN(q) =
SIN(q).
SIN(q – p) = SIN(q)·COS(p) –
= SIN(q)·(–1)
–
The goal,
and end result, of all of this trigonometry is to reduce the absolute value of
the radian measure of the
angle to |q|
< p/2. This allows an easy computation of the number
of terms to be computed in the otherwise
infinite series, depending on the required accuracy.
We have: SIN(X)
= X – X3/3! + X5/5! – X7/7! + X9/9!
– ….+ (–1)
Note that the Nth term in this series is written as TN =
(–1)
that the maximum error from terminating this series at TN is given
by
TN = |X|2N+1/(2N+1)!, where |X| is the absolute value of
X.
Put another
way, let SIN(q)
represent the exact value of the sine of the angle q, represented in radians
and let
SN(q)
= q
– q3/3!
+ q5/5!
– q7/7!
+ q9/9!
– ….+ (–1)N·q2N+1/(2N+1)! represent the finite sum of the
first (N + 1)
terms in the infinite series. We are
guaranteed that the maximum error in using this finite sum as the sine of
the angle is given by |SIN(q) – SN(q)| £ |X|2N+1/(2N+1)!.
More
specifically, for |q|
< p/2,
we are guaranteed that any computational error is bounded
by |SIN(q)
– SN(q)|
£
(p/2)2N+1/(2N+1)!. Given that the factor (p/2)
is a bit tedious to use, and the
fact that (p/2)
< 2, we can say that |SIN(q) – SN(q)| £ (2)2N+1/(2N+1)!
The results
for our error analysis are given in the following table. Note that seven terms are all that is
required for a result to be expressed in the IBM E (Single Precision Floating
Point) format, while 13 terms
are more than good enough for the IBM D (Double Precision Floating Point)
format. The extended
precision floating point may require a few more terms.
|
N |
2N + 1 |
(2)2N+1 |
(2N+1)! |
Max Error |
Significant Digits |
|
3 |
7 |
128 |
5040 |
0.025 |
1 |
|
5 |
11 |
2048 |
39,916,800 |
5.1307·10–5 |
4 |
|
7 |
15 |
32,768 |
1.30767·1012 |
2.5059·10–8 |
7 |
|
9 |
19 |
524,288 |
1.21645·1017 |
4.30999·10–12 |
11 |
|
11 |
23 |
8,388,608 |
2.58520·1022 |
3.24486·10–16 |
15 |
|
13 |
27 |
134,217,728 |
1.08888·1028 |
1.232614·10–20 |
19 |
As an example of the fast
convergence of the series, I consider the evaluation of
the cosine of 1.0 radian, about 57.3 degrees.
Look at the terms in the
infinite series, written as T0 + T2 + T4 + T6
+ T8 + ...,
and construct the partial sums.
N = 0 T0 = + 1.00000000
N = 2 X2 = 1.0 T2 = – 1 / 2 = – 0.50000000
N = 4 X4 = 1.0 T4 = + 1 / 24 = + 0.04166666
N = 6 X6 = 1.0 T6 = – 1 / 720 = – 0.00138889
N = 8 X8 = 1.0 T8 = + 1 / 40320 = + 0.00002480
The terms are decreasing fast. How many terms do we need to evaluate to get a specified precision? Answer: Not many.
The answer for
My calculator computes the value as 0.540302306.
Note the agreement to six digits. Assuming that the value from my calculator is
correct,
the relative error in this series sum approximation is 1.000 000 488 615, or a
percentage
error of 4.89·10–5%. After a few more terms, this result would be
useable almost anywhere.
The absolute error in the above, assuming
again that my calculator is correct,
is given by the difference: 0.000 000
264.
Comparison to the value 0.000 024 800,
which is the maximum theoretical error,
shows that our series approximation will serve very well over a wide range of
arguments.
As we have covered more than enough
Assembler Language syntax to write the loop, there
is no need to write the code for this computation here. The reader may take this as an
exercise, which might actually be fun.
The structure of the computation would be
a loop that sequentially builds the partial sums from the terms as
shown above. The only real question is
the termination criterion for the
computation loop. There are two useable
options.
1. Terminate after a fixed number of terms have
been calculated.
Thirteen terms should be more
than adequate.
2. Terminate
after the absolute value of the calculated term drops below a given value.