Fetch-Execute Cycle
As we shall see, the fetch-execute
cycle forms the basis for operation of a stored-program computer. The CPU fetches each instruction from the
memory unit, then executes that instruction, and fetches the next
instruction. An exception to the “fetch
next instruction” rule comes when the equivalent of a Jump or Go To instruction
is executed, in which case the instruction at the indicated address is fetched
and executed.
Registers vs. Memory
Registers and memory are similar in that both store
data. The difference between the two is
somewhat an artifact of the history of computation, which has become solidified
in all current architectures. The basic
difference between devices used as registers and devices used for memory
storage is that registers are usually faster and more expensive (see below for
a discussion of registers and Level–1 Cache).
The origin of the register vs. memory distinction can be
traced to two computers, each of which was built in the 1940’s: the ENIAC (Electronic Numerical Integrator and Calculator – becoming operational in 1945) and the EDSAC (Electronic Delay Storage Automatic Calculator – becoming operational in 1949). Each of the two computers could have been
built with registers and memory implemented with vacuum tubes – a technology
current and well-understood in the 1940’s.
The difficulty is that such a design would require a very large number
of vacuum tubes, with the associated cost and reliability problems. The ENIAC solution was to use vacuum tubes in
design of the registers (each of which required 550 vacuum tubes) and not to
have a memory at all. The EDSAC solution
was to use vacuum tubes in the design of the registers and mercury delay lines
for the memory unit.
In each of the designs above, the goal was the same – to
reduce the number of “storage units” that required the expensive and
hard-to-maintain vacuum tubes. This
small number of storage units became the register file associated with the
central processing unit (CPU). It was
not until the MIT Whirlwind in 1952 that magnetic core memory was introduced.
In modern computers, the CPU is usually implemented on a
single chip. Within this context, the
difference between registers and memory is that the registers are on the CPU
chip while most memory is on a different chip.
Now that L1 (level 1) caches are appearing on CPU chips (all Pentium™
computers have a 32 KB L1 cache), the main difference between the two is the
method used by the assembly language to access each. Memory is accessed by address as if it were
in the main memory that is not on the chip and the memory management unit will
map the access to the cache memory as appropriate. Register memory is accessed directly by
specific instructions. One of the
current issues in computer design is dividing the CPU chip space between
registers and L1 cache: do we have more registers or more L1 cache? The current answer is that it does not seem
to make a difference.
Both memory and registers can be viewed as collections of D flip-flops, as discussed in a
previous chapter. The main difference is
that registers (as static memory) may
actually be built from these flip-flops, while computer memory is fabricated
from a different technology called dynamic
memory. We often describe main
memory as if it were fabricated from flip-flops as this leads to a model that
is logically correct.
A flip-flop stores one bit of data. An N–bit register is a collection of N
flip-flops; thus a
32–bit register is built from 32 flip-flops.
The CPU contains two types of registers, called special purpose registers and general
purpose registers. The general
purpose registers contain data used in computations and can be accessed
directly by the computer program. The
special purpose registers are used by the control unit to hold temporary
results, access memory, and sequence the program execution. Normally, with one now-obsolete exception,
these registers cannot be accessed by the program.
The program status
register (PSR), also called the program
status word (PSW), is one of the
special purpose registers found on most computers. The PSR contains a number of bits to reflect
the state of the CPU as well as the result of the most recent computation. Some of the common bits are
C the carry-out
from the last arithmetic computation
V Set to 1 if the last arithmetic operation resulted in an overflow
N Set to 1 if the last arithmetic operation resulted in a negative number
Z Set to 1 if the last arithmetic operation resulted in a zero
I Interrupts enabled
(Interrupts are discussed later)
More on the CPU (Central Processing Unit)
The central processing unit
contains four major elements
1) The
ALU (Arithmetic Logic Unit), and
2) The
control unit, and
3) The
register file (including user registers and special-purpose registers), and
4) A
set of buses used for communications within the CPU.
The next figure shows a
better top-level view of the CPU, showing three data buses and an ALU optimized
for standard arithmetic. Most arithmetic
(consider addition: C = A + B) is based on production of a result from two
arguments. To facilitate such
operations, the ALU is designed with two inputs and a single output. As each input and output must be connected to
a bus internal to the CPU, this dictates at least three internal CPU buses.
The register file
contains a number of general-purpose registers accessible to the assembly
language operations (often numbered 0 through some positive integer) and a
number of special-purpose registers not directly accessed by the program. With numbered registers (say R0 through R7)
it is often convenient to have R0 be identically 0. Such a constant register greatly simplifies
the construction of the control unit.
Some of the special purpose
registers used by the central processing unit are listed next.
PC the program counter contains the address of
the assembly language instruction
to be executed next.
IR the instruction register contains the
binary word corresponding to the machine
language version of the
instruction currently being executed.
MAR the memory address register contains the
address of the word in main memory
that is being
accessed. The word being addressed
contains either data or
a machine language
instruction to be executed.
MBR the memory buffer register (also called MDR
for memory data register) is the
register used to
communicate data to and from the memory.
We may now sketch some of
the operation of a typical stored program computer.
Reading Memory First
place an address in the MAR.
Assert
a READ control signal to command memory to be read.
Wait
for memory to produce the result.
Copy
the contents of the MBR to a register in the CPU.
Writing Memory First
place and address in the MAR
Copy
the contents of a register in the CPU to the MBR.
Assert
a WRITE control signal to command the memory.
We have mentioned the
fetch-execute cycle that is common to all stored program computers. We may now sketch the operation of that cycle
Copy the contents of the PC into the MAR.
Assert a READ control
signal to the memory.
While waiting on the
memory, increment the PC to point to the next instruction
Copy the MBR into the
IR.
Decode the bits found
in the IR to determine what the instruction says to do.
The control unit
issues control signals that cause
the CPU (and other components of the computer) to fetch the instruction to the
IR (Instruction Register) and then execute the actions dictated by the machine
language instruction that has been stored there. One might imagine the following sequence of
control signals corresponding to the instruction fetch.
T0: PC to Bus1,
Transfer Bus1 to Bus3, Bus3 to MAR, READ.
T1: PC
to Bus1, +1 to Bus2, Add, Bus3 to PC.
T2: MBR
to Bus2, Transfer Bus2 to Bus3, Bus3 to IR.
This simple sequence
introduces a number of concepts that will be used later.
1. The
internal buses of the CPU are named Bus1, Bus2, and Bus3.
2. All
registers can transfer data to either Bus1 or Bus2.
3. Only
Bus3 can transfer data into a register.
4. Only
the ALU can transfer data from either Bus1 to Bus3 or Bus2 to Bus3.
It does this by a specific
transfer operation.
5. Control
signals are named for the action that they cause to take place.
Operation of the
Control Unit
We now examine very briefly the two most common methods for
building a control unit. Recall that the
only function of the control unit is to emit control signals, so that the
design of a control unit is just an investigation of how to generate control
signals. There are two major classes of
control units: hardwired and microprogrammed (or microcoded). In order to see the difference, let’s write
the above control signals for the common fetch sequence in a more compact
notation.
T0: PC ® Bus1, TRA1, Bus3 ® MAR,
READ.
T1: PC
®
Bus1, +1 ®
Bus2, ADD, Bus3 ®
PC.
T2: MBR
®
Bus2, TRA2, Bus3 ®
IR.
Here we have used ten
control signals. Remember that the ALU
has two inputs, one from Bus1, one from Bus2, and outputs its results on
Bus3. The control signals used are:
PC ®
Bus1 Copy the contents of the PC
(Program Counter) onto Bus1
+1 ® Bus2 Copy the contents of the constant
register +1 onto Bus2.
MBR ® Bus2 Copy the contents of the MBR (Memory
Buffer Register) onto Bus2
TRA1 Causes
the ALU to copy the contents of Bus1 onto Bus3
TRA2 Causes
the ALU to copy the contents of Bus2 onto Bus3
ADD Causes
the ALU to add the contents of Bus1 and Bus2,
placing
the sum onto Bus3.
READ Causes
the memory to be read and place the results in the MBR
Bus3 ® MAR Copy the contents of Bus3 to the MAR
(Memory Address Register)
Bus3 ® PC Copy the contents of Bus3 to the PC (Program Counter)
Bus3 ® IR Copy the contents of Bus3 to the IR (Instruction Register)
All control units have a
number of important inputs, including the system clock, the IR, the PSR
(program status register) and other status and control signals. A hardwired
control unit uses combinational logic to produce the output. The following shows how the above signals
would be generated by a hardwired control unit.
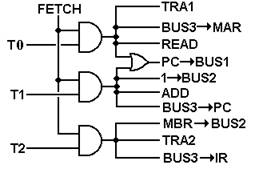
Here we assume that we have the
discrete signal FETCH, which is asserted during the fetch phase of the
instruction processing, and discrete time signals T0, T1, and T2, which would
be generated by a counter within the control unit. Note here that we already have a naming
problem: there will be a distinct phase of the Fetch/Execute cycle called
“FETCH”. During that cycle, the discrete
signal FETCH will be active. This
discrete signal is best viewed as a Boolean value, having only two values:
Logic 1 (+5 volts) and Logic 0 (0 volts).
We next consider how a microprogrammed unit would generate
the above signals. In this discussion,
we shall present a simplified picture of such a control with a number of design
options assumed; these will be explained later in the text.
The central part of a microprogrammed control unit is the micro-memory, which is used to store
the microprogram (or microcode). The microprogram essentially interprets the
machine language instructions in that it causes the correct control signals to
be emitted in the correct sequence. The
microprogram, written in microcode, is stored in a read-only memory (ROM, PROM,
or EPROM), which is often called the control
store.
A microprogrammed control unit functions by reading a
sequence of control words into a microinstruction buffer that is used to
convert the binary bits in the microprogram into control signals for use by the
CPU. To do this, there are several other
components
the mMAR the micro-address of the next control word
to read
the mMBR this holds the last control word read from
the micro-memory
the sequencer this computes the next value of the address
for the mMAR.
The figure below shows the structure of a sample
microprogrammed control unit.
The microprogram for the three steps in fetch would be
10010 00011
11001 01000
00100 10100
The Pipelined CPU
Pipelining is a technique that
allows multiple instructions to be in execution at the same time within the
CPU. Some of the techniques used, such
as instruction pre–fetching, date back to the development of the IBM Stretch
(7030) in the early 1950’s. While it is
possible that most of the theory of pipelining was developed that early, it was
not until the arrival of VLSI chips with their excess of transistors that
pipelining really became effective.
While the design is called
“pipelining”, it really ought to be called “assembly lining”, because an
instruction pipeline resembles nothing so much as the assembly line in an
automobile plant. At each stage in an
automobile assembly line, a distinct operation is performed on the car
assembly, leading at the end to a complete automobile. In a CPU pipeline, the execution of an
instruction is broken into primitive steps that are assigned to independent
units.
The Assembly Line
Here is a picture of the Ford
assembly line in 1913. It is the number
of cars per hour that roll off the assembly line that is important, not the
amount of time taken to produce any one car.

Henry Ford began working on the
assembly line concept about 1908 and had essentially
perfected the idea by 1913. His
motivations are worth study. In earlier
years, automobile manufacture had been done by highly skilled technicians, each
of whom assembled the whole car. It
occurred to Mr. Ford that he could get more get more workers if he did not
require such a high skill level. One way
to do this was to have each worker perform only a small
number of tasks related to manufacture of the entire automobile. It soon became obvious that is was easier to
bring the automobile to the worker than have the worker (and
his tools) move to the automobile. The CPU pipeline has a number of
similarities.
1. The execution of an instruction is
broken into a number of simple steps, each
of which can be
handled by an efficient execution unit.
2. The CPU is designed so that it can
simultaneously be executing a number of
instructions, each
in its own distinct phase of execution.
3. The important number is the number of
instructions completed per unit time,
or equivalently
the instruction issue rate.
The MIPS Pipeline
The best way to discuss the
pipeline idea is to show a sample high–level diagram. This is the pipeline for the MIPS (Microprocessor without Interlocked Pipeline Stages [R105])
that was developed in 1981 by a team at Stanford
University lead by John L. Hennessy. Our
description of the CPU for the MIPS comes from the standard text by Patterson
and Hennessy [R80]; the second author was the one who lead the development team.
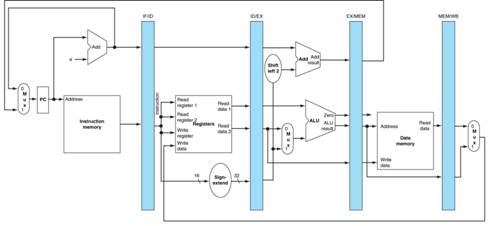
The MIPS pipeline design is based on
the five–step instruction execution discussed; the pipeline will have five
stages, with one stage for each step in the execution of a typical instruction.
1. IF: Fetch instruction from memory.
2. ID: Decode the instruction and read two
registers.
3. EX: Execute the operation or calculate an
address.
4. MEM: Access an operand in data memory or write
back a result.
5. WB:
For LW (load word) only, write the results of the memory read into a register.
Here is a figure, taken from
[R80] to illustrate the MIPS pipeline.
It shows the execution pipeline broken into five stages, with additional
register sets inserted between the stages.
Thus, we have the IF/ID (Instruction Fetch / Instruction Decode)
register set between the first two stages.
Note also, the three ALUs; two extra are required to support pipelining. One should consider the instructions as
moving from left to right in this pipeline; those to the right are in a more
advanced stage of execution.
A fuller
explanation of this figure will be given in the graduate course on computer
architecture. The only reason for
showing it here is to make two points.
1. The
execution of an instruction can be broken into sequential stages.
2. There
is additional hardware required to support pipelining.
As a design
feature, pipelining is similar to very many enhancements. If added “after the fact”, it will be very
hard to implement correctly. It is much
better to design the ISA (Instruction Set Architecture) with pipelining in
mind. This brings home a very important feature of design: the
compilers, operating system, ISA, and hardware implementation must all be
designed at the same time. Put another
way, the system must be designed as a whole, with appropriate trade–offs
between subsystems in order to optimize the overall performance.
Features of
the MIPS design that were intended to facilitate pipelining include:
1. The
fact that all instructions are the same length.
2. The
small number of instruction formats.
3. The
regularity of the instruction format, always beginning with a 6–bit opcode,
followed by two 5–bit register
identifiers.
4. The
use of the load/store design, restricting memory accesses to
only two, well defined, steps.
5. The
fact that only one instruction writes to memory and that as the last stage in
instruction execution. This has major impact on the design to handle
interrupts,
especially the page–fault
interrupts generated by a virtual memory system.
Many of these
features are precisely those that characterize a RISC design, as discussed
later in this chapter. In fact, the MIPS
is properly called a RISC architecture. The reader is advised to consult with the
referenced textbook [R80] for more details on this design.
In order to
discuss the operation of the pipeline and focus on the difficulties associated
with a correct pipeline design, we focus on a five–line fragment of MIPS
assembly language.
SUB $2, $1, $3 # The “$” denotes a register.
$2
AND $12, $2, $5 # is
register 2 in the register file.
OR $13, $6, $2 # Note that
$2 is used in each line.
ADD $14, $2, $2 # 100($2) is an address calculation.
SW $15,
100($2) # Add 100 to contents of $2.
Ideally a
pipelined CPU should function in much the same way as an automobile assembly
line; each stage operates in complete independence of every other stage. The instruction is issued and enters the pipeline.
It then moves through each of the execution stages, until it is
completed and exits the pipeline. The
next table shows the stage of execution for each of the five instructions above
for each clock cycle. In clock cycle 5,
the SUB instruction is in WB, the AND instruction is in MEM, etc.
|
Time (Clock Cyles)
|
CC1
|
CC2
|
CC3
|
CC4
|
CC5
|
CC6
|
CC7
|
CC8
|
CC9
|
|
SUB $2, $1, $3
|
IF
|
ID
|
EX
|
MEM
|
WB
|
|
|
|
|
|
AND $12, $2, $5
|
|
IF
|
ID
|
EX
|
MEM
|
WB
|
|
|
|
|
OR $13, $6, $2
|
|
|
IF
|
ID
|
EX
|
MEM
|
WB
|
|
|
|
ADD $14, $2, $2
|
|
|
|
IF
|
ID
|
EX
|
MEM
|
WB
|
|
|
SW $15, 100($2)
|
|
|
|
|
IF
|
ID
|
EX
|
MEM
|
WB
|
Another way to look at this is ordered by
clock pulse and shows what four of the five stages in the pipeline is doing at any given time.
WB is omitted to keep the table readable.
|
CC
|
IF
|
ID
|
EX
|
MEM
|
|
1
|
SUB $2, $1, $3
|
An
earlier instruction.
|
An
earlier instruction.
|
An
earlier instruction.
|
|
2
|
AND $12, $2, $5
|
SUB $2, $1, $3
|
An
earlier instruction.
|
An
earlier instruction.
|
|
3
|
OR $13, $6, $2
|
AND $12, $2, $5
|
SUB $2, $1, $3
|
An
earlier instruction.
|
|
4
|
ADD $14, $2, $2
|
OR $13, $6, $2
|
AND $12, $2, $5
|
SUB $2, $1, $3
|
|
5
|
SW $15, 100($2)
|
ADD $14, $2, $2
|
OR $13, $6, $2
|
AND $12, $2, $5
|
We can use either of these two tables to
examine the progression of instructions through the execution pipeline. Ideally, as an instruction progresses through
the pipeline it does not depend on the results of any other instruction now in
the pipeline. Obviously, this cannot
always be the case; in our example above, it is not the case.
There is one absolute requirement for
correct operation of a pipeline. We use
the above code fragment to illustrate this requirement.
SUB $2, $1, $3
AND $12, $2, $5
OR $13, $6, $2
ADD $14, $2, $2
SW $15,
100($2)
The effect of executing this code must be
the same as it would have been had the code been executed on a simple
non–pipelined CPU. In particular, the
value in register $2, computed in the first instruction, must be the value used
in all following instructions. Suppose
that the effect of the SUB instruction is to change the
value stored in $2 from 10 to –20. The
next four instructions must use this new value, not the older value of +10.
What can we
say that will always be true about pipelined execution?
1. It
is not possible for any instruction to depend on the results of instructions
that will execute in the
future. This is a logical impossibility.
2. Instructions
can have dependence only on those previously executed; however,
there are no issues associated
with dependence on instructions that have completed
execution and exited the
pipeline. Results of these instructions
have been stored in
either the memory or register
file, and are available for immediate use.
3. It
is possible, and practical, to design a compiler that will minimize problems in
the pipeline. This is a desirable result of the joint
design of compiler and ISA.
4. It
is not possible for the compiler to eliminate all pipelining problems without
reducing the CPU to a non–pipelined
datapath, which is unacceptably slow.
A pipeline hazard occurs when an
instruction cannot complete a step in its execution, due to some event in the
previous clock cycle. When an
instruction must be held for one or more clock pulses in order to complete a
step in its execution, this is called a “pipeline
stall”, informally a “bubble”. These pipeline problems are called
hazards. They come in three varieties: structural
hazards, data hazards, and control hazards.
Structural hazards occur when
the instruction set architecture does not match the design of the control
unit. In other words, the hardware
cannot support the combination of instructions that we want to execute in the
same clock cycle. Careful design can
eliminate this type of problem.
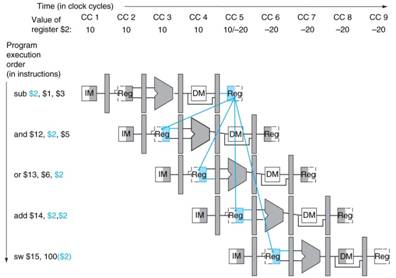
Data hazards are due to tight
dependencies in sequences of machine language instructions. These occur when one step in the pipeline
must await the completion of a previous instruction. A good compiler can reduce these hazards, but
not eliminate them. Our example code
section above illustrates a typical data hazard.
The next
figure, taken from [R80] assumes that the effect of the first instruction is to
change the contents of register $2 from 10 to –20. This result is not available in the register
file until the first half of CC 5; thus the two instructions (AND, OR)
following the first get bad values.
Control hazards, also called branch hazards, arise from the need to
make a decision based on the results of one instruction while others are executing. A typical example would be the execution of a
conditional branch instruction. If the
branch is taken, the instructions currently in the pipeline might be invalid. As an example, consider the following
execution flow which has no data hazards.
The instruction at address 40 is in
the Execution stage of the datapath,
The
instruction at address 44 is in the Instruction Decode stage, and
The instruction at address 48 is in
the Instruction Fetch stage.
The MIPS is a byte–addressable machine,
with 32–bit instructions. The address of
the instruction after that at 40 is 44. When the BEQ executes, the PC already has
value 44. The branch target address is
the value 7 multiplied by 4 and added to the PC; 4·7 + 44 = 72.
40 BEQ $1, $3, 7 #
Branch if ($1 == $3)
44 AND $12, $2, $5
48 OR $13, $6, $2
52 ADD $14,
$2, $2
72 LW $4,
50($7)
There are two possible outcomes
for the execution of the BEQ:
1. The branch is not
taken. Execution proceeds without delay.
2. The
branch is taken. The partially executed
instructions at addresses 44 and 48 must
be removed from the pipeline
without having changed the machine state.
A more
thorough discussion of pipelining, pipeline hazards, and the remedies to those
hazards would be interesting but take too much time. This textbook requires a
knowledge of what a data hazard is, because they are considered in the
design of some supercomputers.
Levels of Machines and Virtual Machines
As with any system, a
computer can be viewed from a number of perspectives or levels of detail. Each level corresponds to a virtual machine –
one able to execute directly a specific language. For example, many people view computers as
virtual machines that directly execute e-mail programs, spread sheets, or word
processors. These people do not care
about the lower level instructions that actually cause the machine to function,
nor should they.
Put another way, many people
consider the computer as just another appliance – that is, something that does
its job with little human interaction.
In this author’s opinion, this fact is one of the major achievements of
the computer industry.
“Levels” of Automobiles
In order to motivate the
idea of levels of machines, let us consider what might be called “levels of
automobiles” or more precisely, the level of detail at which a particular user
chooses to understand an automobile. As
an example, let us think about the Rolls Royce Phantom (the 2004 model is
priced at only $470,000, in case you want to buy one). There are a number of levels at which to view
this automobile.
The automobile collector will view the car as a work of art. The possibility that one might drive the
thing might not even occur to him or her.
The VIP (very rich person or diplomat) will view the automobile as
something that transports him or her to the desired destination. Admittedly, the automobile does not drive
itself, but it might as well, given the fact that it almost always has a paid chauffeur.
The casual driver will understand the basics of operating the vehicle –
use of the keys, transmission, steering wheel, and other controls. To this person, the automobile is just a
machine that can be controlled in predictable ways.
The more involved driver will, in addition,
understand that the automobile comprises a number of subsystems, such as the
chassis, engine, transmission, and electronic systems. He or she will understand the necessity of
system maintenance without being able to perform it.
The automobile mechanic will understand the details of each of the
automobile subsystems and how to repair them.
Note that this is a lower (more detailed) level of understanding than
the involved driver. The mechanic not
only understands that the subsystems exist but also understands how they work
and how to fix them.
The automobile engineer will understand one of the subsystems in
detail, for example the detailed kinetics of fuel combustion, metallurgy of the
engine block, or dynamics of the electrical system.
Using this analogy, the goal
of this course is to give the student an understanding of a computer somewhere
between that of a mechanic and an engineer.
Levels of Machines in the
Computer Hierarchy
A traditional view of the
computer (see Tanenbaum [R15] or Murdocca
& Heuring [R16]) presents between five and eight
levels of machines. Here we construct a
typical list.
9. Application Programs
(Appliance level),
8. High
Level (Problem Oriented) Languages,
7. Assembly
language,
6. Operating
system services (such as BIOS calls)
5. Binary
machine language,
4. Micro-operation
level (usually microprogramming),
3. Functional
units (memory, ALU, etc.)
2. Logic
gates, including SSI and MSI components.
1. Transistors
and wires.
We skip over level 9 (application
programs) and begin our top-down study with level 8 (High Level
Languages). A high-level language
programmer may experience the computer as a machine that directly executes the
high-level language, such as C++, Visual Basic, COBOL, or FORTRAN. In fact, very few machines are designed for
direct execution of high-level languages (there are several LISP machines and a
FORTH machine), but one may imagine a virtual
machine that does exactly that. In
practice, most virtual machines operating at the high-level language level
achieve their effect by compiling the program into a form suitable for
execution on a lower-level machine. The
figure below shows two of the more common ways in which a high-level language virtual
machine functions.
Before discussing this
figure, it is important to understand the differences between level 6 (the
Operating System/BIOS level) and level 5 (the Binary Machine Language
level). In some aspects, levels 5 and 6
are identical. The major difference is
that level 6 may be regarded as providing standard service routines, such as
those in the Basic Input-Output System (BIOS).
The operating code for both levels 5 and 6 is binary machine code.
Some compilers (mainly the
older ones) compile directly to assembly language, which is then assembled into
calls to level 6 machine language. Some
compile directly to level 6 code.
At this point, we see an
important part of the separation of levels.
Consider modern languages, such as C++ and Java. At level 8, all computers that execute such
code appear to be almost identical, with slight differences (such as integer
sizes) that can be handled by use of macros and other definitions. At level 7, the computers may appear quite
different as each computer brand seems to have its own particular assembly
language.
The transition between
levels 6 and 7 (assembly language & O/S services) and level 5 is often
achieved by a linking loader. This
transition allows programs to be loaded at any free part of memory, rather than
at fixed locations (as was the case with some earlier machines). Thus we have two views of machines – the
level 6/7 virtual machine in which the program always loads at a fixed location
and the level 5 machine in which the program is relocated.
The split between levels 5
and 4 reflects the fact that there are a number of ways in which to implement a
Central Processing Unit (CPU) to execute a machine language. The two primary methods for machine language
execution are hard-wired and microprogrammed.
This separation between these two levels allows a company to build a
series of computers with widely differing performance levels but with the same
assembly/machine language set. For
examples, we look to the IBM 360 series and the DEC (Digital Equipment
Corporation – no longer in business) PDP–11 series.
Here is a quote from an
article by C. Gordon Bell in William Stallings []. It discusses two different implementations of
the IBM 360 family, each with the same assembly language.
“The IBM 360,
introduced in 1964, was one of the earliest computer families to span a range
of price and performance. Along with the
360, IBM introduced the word ‘architecture’ to refer to the various processing
characteristics of a machine as seen by the programmer and his programs. In the initial 360 product family, the model
91 exceeded the model 20 in performance by a factor of 300, in memory size by a
factor of 512, and in price by a factor of 100.”
The next three layers form
the basis for the hardware implementation of the computer. As technology improves, we see two trends in
implementation at this level: more powerful units for the same price and
equally powerful units for a lesser price.
One very early example of this was the IBM 709/7090 series, both of
which implemented the same machine language and used the same hardwired control
design. The difference is that the IBM
709 used vacuum tubes as the basic circuit elements, while the IBM 7090 used
transistors.
Probably the major
revolution in computer design occurred at these low levels with the
introduction to the integrated circuit to replace circuits built from discrete
transistors. The transition from
vacuum tubes to transistors resulted in considerable gains in reliability and
reductions in power usage. The
transition from transistors to integrated circuits, especially VLSI (Very Large
Scale Integration) chips allowed the introduction of the modern micro-computer
and all that has gone with it.
RISC vs. CISC Computers
One of the recent developments in computer architecture is
called by the acronym RISC. Under this
classification, a design is either RISC or CISC, with the following
definitions.
RISC Reduced Instruction
Set Computer
CISC Complex Instruction Set Computer.
The definition of CISC architecture is very simple – it is
any design that does not implement RISC architecture. We now define RISC architecture and give some
history of its evolution.
The source for these notes is the book Computer Systems
Design and Architecture, by Vincent P. Heuring
and Harry F. Jordan [R03].
One should note that while the name “RISC” is of fairly
recent origin (dating to the late 1970’s) the concept can be traced to the work
of Seymour Cray, then of Control Data Corporation, on the CDC–6600 and related machines. Mr. Cray did not think in terms of a reduced
instruction set, but in terms of a very fast computer with a well-defined
purpose – to solve complex mathematical simulations. The resulting design supported only two basic
data types (integers and real numbers) and had a very simple, but powerful,
instruction set. Looking back at the
design of this computer, we see that the CDC–6600 could have been called a RISC
design.
As we shall see just below, the entire RISC vs. CISC
evolution is driven by the desire to obtain maximum performance from a computer
at a reasonable price. Mr. Cray’s
machines maximized performance by limiting the domain of the problems they
would solve.
The general characteristic of a CISC architecture is the
emphasis on doing more with each instruction.
This may involve complex instructions and complex addressing modes; for
example the MC68020 processor supports 25 addressing modes.
The ability to do more with each instruction allows more
operations to be compressed into the same program size, something very
desirable if memory costs are high. Some
historical data will illustrate the memory issue. Better cost data are found in the chapter on
memory.
|
Time
|
Cost of memory
|
Cost of disk drive
|
|
Introduction of MC6800
|
$500 for 16KB RAM
|
$55,000 for 40 MB
|
|
Introduction of MC68000
|
$200 for 64 KB RAM
|
$5,000 for 10 MB
|
|
Now (Micron 4/10/2002)
|
$49 for 128 MB RAM
|
$149 for 20 GB
|
Another justification for the CISC architectures was the
“semantic gap”, the difference between the structure of the assembly language
and the structure of the high level languages (COBOL, C++, Visual Basic,
FORTRAN, etc.) that we want the computer to support. It was expected that a more complicated
instruction set (more complicated assembly language) would more closely
resemble the high level language to be supported and thus facilitate the
creation of a compiler for the assembly language.
One of the first motivations for the RISC architecture came
from a careful study of the implications of the semantic gap. Experimental studies conducted in 1971 by
Donald Knuth and 1982 by David Patterson showed that nearly 85% of a programs
statements were simple assignment, conditional, or procedure calls. None of these required a complicated
instruction set. It was further notes
that typical compilers translated complex high level language constructs into
simpler assembly language statements, not the complicated assembly language
instructions that seemed more likely to be used.
The results of this study are quoted from an IEEE Tutorial
on RISC architecture [R05]. This table
shows the percentages of program statements that fall into five broad
classifications.
|
Language
|
Pascal
|
FORTRAN
|
Pascal
|
C
|
SAL
|
|
Workload
|
Scientific
|
Student
|
System
|
System
|
System
|
|
Assignment
|
74
|
67
|
45
|
38
|
42
|
|
Loop
|
4
|
3
|
5
|
3
|
4
|
|
Call
|
1
|
3
|
15
|
12
|
12
|
|
If
|
20
|
11
|
29
|
43
|
36
|
|
GOTO
|
2
|
9
|
--
|
3
|
--
|
|
Other
|
|
7
|
6
|
1
|
6
|
The authors of this study made the following comments on the
results.
“There is quite good
agreement in the results of this mixture of languages and applications. Assignment statements predominate, suggesting
that the simple movement of data is of high importance. There is also a preponderance of conditional
statements (If, Loop). These statements are implemented in machine
language with some sort of compare and branch instruction. This suggests that the sequence control
mechanism is important.”
The “bottom line” for the
above results can be summarized as follows.
1) As
time progresses, more and more programs will be written in a compiled high-
level language, with much
fewer written directly in assembly language.
2) The
compilers for these languages do not make use of the complex instruction
sets provided by the architecture
in an attempt to close the semantic gap.
In 1979, the author of these
notes attended a lecture by a senior design engineer from IBM. He was discussing a feature of an
architecture that he designed: he had put about 6 months of highly skilled labor
into implementing a particular assembly language instruction and then found
that it was used less than 1/10,000 of a percent of the time by any compiler.
So the “semantic gap” – the
desire to provide a robust architecture for support of high-level language
programming turned out to lead to a waste of time and resources. Were there any other justifications for the
CISC design philosophy?
The other motivation for the RISC architecture is that a
complex instruction set implies a slower computer. It is not just the fact that the more complex
instructions execute more slowly than the simpler instructions. There is also the fact that making a CPU
capable of handling more complex instructions causes it to execute simple
instructions more slowly.
Thus we are facing the facts that the more complex
instruction sets are not necessary and that dropping the ability to support
them will yield a faster CPU. There are
other factors that favor the RISC architecture, specifically the fact that
speed-up techniques such as instruction pre-fetching and instruction pipelining
are more easily achieved for simple instructions.
The name RISC, Reduced
Instruction Set Computer, focuses on reducing the number and complexity of
instructions in the machine. A number of
common strategies are:
1) Fixed instruction
length, generally one word. This
simplifies instruction fetch.
2) Simplified
addressing modes.
3) Fewer
and simpler instructions in the instruction set.
4) Only
load and store instructions access memory; no add memory to register, etc.
5) Let
the compiler do it. Use a good compiler
to break complex high-level language
statements into a number of
simple assembly language statements.
The philosophy behind the RISC
approach is well described in the IEEE tutorial. Here we pick up on a narrative by a design
engineer who worked on the IBM 801 project.
“About this point,
several people, including those who had been working on microprogramming tools,
began to rethink the architectural design principles of the 1970’s. In trying to close the ‘semantic gap’, these
principles had actually introduced a ’performance gap’. The attempt to bridge the gap with WCS’s
[Writable Control Stores – microprogrammed control units] was unsuccessful.”
“A new computer
design philosophy evolved: Optimizing compilers could be used to compile
‘normal’ programming languages down to instructions that were as unencumbered
as microinstructions in a large virtual address space, and to make the
instruction cycle time as fast as the technology would allow. These machines would have fewer instructions
– a reduced set – and the remaining instructions would be simple and would
generally execute in one cycle – reduced instructions – hence the name reduced
instruction set computers (RISC’s).
RISC’s inaugurated a new set of architectural design principles.
1. Functions should be kept
simple unless there is a very good reason to do
otherwise.
2. Microinstructions should not
be faster than simple instructions.
3. Microcode is not magic.
4. Simple decoding and
pipelined execution are more important than
program size.
5. Compiler technology should
be used to simplify instructions rather
than to generate complex
instructions.”
The narrative from the tutorial
continues with remarks on the RISC architectures developed at the University of California
at Berkeley.
“Although each
project [the Berkeley RISC I and RISC II and the IBM 801] had different
constraints and goals, the machines they eventually created have a great deal
in common.
1. Operations are
register-to-register, with only LOAD and STORE
accessing memory.
2. The operations and
addressing modes are reduced. Operations
between registers complete in one cycle, permitting a simpler, hardwired
control for each RISC, instead of microcode.
Multiple-cycle instructions such as floating-point arithmetic are either
executed in software or in a special-purpose processor. (Without a coprocessor, RISC’s have mediocre
floating-point performance.) Only two
simple addressing modes, indexed and PC-relative, are provided. More complicated addressing modes can be
synthesized from the simple ones.
3. Instruction formats are
simple and do not cross word boundaries.
This restriction allows RISC’s to remove instruction decoding time from
the critical execution path. … RISC
register operands are always in the same place in the
32-bit word, so register access can take place simultaneously with opcode
decoding. This removes the instruction
decoding stage from the pipelined execution, making it more effective by
shortening the pipeline.”
There are a number of other
advantages to the RISC architecture. We
list a few
Better Access to Memory
According to the IEEE Tutorial
“Register-oriented
architectures have significantly
lower data memory bandwidth. Lower data
memory bandwidth is highly desirable since data access is less predictable than
instruction access and can cause more performance problems.”
We note that, even at 6.4
GB/second data transfer rates, access to memory is still a bottleneck in modern
computer design, so any design that reduces the requirement for memory access
(here called reducing the memory bandwidth) would be advantageous.
Better Support of Compilers
According to the IEEE Tutorial
“The load/store
nature of these [existing RISC] architectures is very suitable for effective
register allocation by the compiler; furthermore, each eliminated memory
reference results in saving an entire instruction.”
We note here that more
effective register allocation by a compiler will usually result in
faster-running code. We see this as
another advantage of the RISC design.
The Dynamic–Static Interface
In order to understand the DSI, we must place
it within the context of a compiler for a higher–level language. Although most compilers do not emit assembly
language, we shall find it easier to under the DSI if we pretend that they do.
What does the compiler output?
There are two options:
1. A very simple assembly language.
This requires a sophisticated compiler.
2. A more complex assembly language. This may allow a simpler compiler,
but it requires a more complex
control unit.
The DSI really defines the division between
what the compiler does and what the microarchitecture does. The more complexity assigned to the compiler,
the less that is assigned to the control unit, which can be simpler, faster,
and smaller.
One should put the DSI conversation within
the context of the fact that we have become very good at writing efficient
compilers. This is especially true in
management of the register file, as well as identifying code segments that can
be run in parallel, were parallel execution units available. Some modern hardware architectures explicitly
allow multiple instructions to be issued at once, but depend on the compiler to
issue execution packets. While this
grouping of instructions into execution packets could be done by hardware at
execution time, that would lead to a great increase in hardware complexity.
Instruction Pre-Fetching
One advantage of the RISC
architecture is seen in the process referred to as
instruction pre-fetching. In this
process, we view the fetch-execute process as a pipeline.

In a traditional fetch-execute
machine, the instruction is first fetched from memory and then executed. Very early in CPU design, it was recognized
that the fetch unit should be doing something during the time interval for
executing the instruction. The logical
thing for the fetch unit to do was to fetch the instruction in the next memory
location on the chance that it would be the instruction that would be executed
next. This process has been shown to
improve computer performance significantly.
The logic to pre-fetch instructions is facilitated by the RISC design
philosophy that all instructions are the same size, so in a machine based on
32-bit words the pre-fetch unit just grabs the next four bytes.
Instruction pre-fetching
appears rather simple, except in the presence of program jumps, such as occur
in the case of conditional branches and the end of program loops. A lot of work has gone into prediction of the
next instruction in such cases, where there are two instructions that could be
executed next depending on some condition.
It may be possible to execute both candidate instructions and discard
the result of the instruction not in the true execution path.
Implications for the Control Unit
The
complex instructions in a CISC computer tend to require more support in the
execution than can conveniently be provided by a hardwired control unit. For this reason, most CISC computers are
microprogrammed to handle the complexity of each of the instructions. For this reason, most CISC instructions
require a number of system clock cycles to execute. The RISC approach emphasizes use of a simpler
instruction set that can easily be supported by a hardwired control unit. As a side effect, most RISC instructions can
be executed in one clock cycle. A given
computer program will compile into more RISC instructions than CISC
instructions, but the CISC instructions execute more slowly than the RISC
instructions. The overall effect on the
computer program may be hard to predict.
According to the tutorial
“Reducing the instruction set further
reduces the work a RISC processor has to do.
Since RISC has fewer types of instructions than CISC, a RISC instruction
requires less processing logic to interpret than a CISC instruction. The effect of such simplification is to speed
up the execution rate for RISC instructions.
In a RISC implementation it is theoretically possible to execute an
instruction each time the computer’s logic clock ticks. In practice the clock rate of a RISC
processor is usually three times that of the instruction rate.”
We close
this section by giving a comparison of some RISC and CISC computers and quoting
some of the experience of the Digital Equipment Corporation when it tried to
manufacture a RISC version of its Micro-VAX (a follow-on
to the PDP-11). Here is the table, taken
from the IEEE tutorial on RISC architecture.
|
|
CISC Type Computers
|
RISC Type
|
|
|
IBM 370/168
|
VAX-11/780
|
Intel 8086
|
RISC I
|
IBM 801
|
|
Developed
|
1973
|
1978
|
1978
|
1981
|
1980
|
|
Instructions
|
208
|
303
|
133
|
31
|
120
|
|
Instruction size (bits)
|
16 – 48
|
16 – 456
|
8 – 32
|
32
|
32
|
|
Addressing Modes
|
4
|
22
|
6
|
3
|
3
|
|
General Registers
|
16
|
16
|
4
|
138
|
32
|
|
Control Memory Size
|
420 Kb
|
480 Kb
|
Not given
|
0
|
0
|
|
Cache Size
|
64 Kb
|
64 Kb
|
Not given
|
0
|
Not given
|
Note the control memory size on the
two RISC type computers – each has no control memory. This implies that the control unit is purely
hardwired. Experience in the 1980’s and
early 1990’s suggested that microprogrammed control units were preferable, even
if they were a bit slower than hardwired units.
It was argued that the speed of the control unit was not the limiting
factor in performance, and it probably was not.
The plain fact, however, was that implementing a hardwired control unit
for some of the complex instruction sets was a daunting challenge not willingly
faced by the computer designers. Rather
than spend a great fortune on designing, building, and debugging such a unit,
they elected to create control units that could be managed – these were
microprogrammed.
With the development of RISC
architecture, hardwired control units again became feasible.
Another Look at Microprogrammed Control Units
In considering the RISC
design, we should recognize the fact that it is not equivalent to use of a
hardwired control unit; only more compatible with such a unit. Many modern control units might be considered
as hybrid, with mostly hardwired control and provisions for the use of
micro-routines (in microcode) to handle useful, but complex, instructions.
It has been hinted above
that microprogramming has been used as a tool to allow feasible and
cost-effective implementations of complex instruction sets. It is profitable to consider the correlation
between complex instructions and the use of a microprogrammed control unit;
specifically asking the question of the allocation of lines of microcode to
assembly language instructions.
Digital
Equipment Corporation (DEC) undertook an experiment to investigate this
correlation and produced a design yielding interesting, but not surprising,
results, which are again quoted from the IEEE tutorial on RISC architecture.
“DEC reported a subsetting
experiment on two implementations of the VAX architecture in VLSI. The VLSI VAX has nine custom VLSI chips and
implements the complete VAX-11 instruction set.
DEC found that 20.0 percent of the instructions are responsible for 60.0
percent of the microcode and yet are only 0.2 percent of all instructions
executed. By trapping to software to
execute these instructions, the MicroVAX 32 was able to fit the subset
architecture onto only one chip, with an optional floating-point processor on
another chip. .. The VLSI VAX uses five
to ten times the resources of the MicroVAX 32 to implement the full instruction
set, yet is only 20 percent faster.”
|
|
VLSI
VAX
|
MicroVAX
32
|
|
VLSI Chips
|
9
|
2
|
|
Microcode
|
480K
|
64K
|
|
Transistors
|
1250K
|
101K
|
The result is obvious – a simple and
cheaper computer will do most of what you want.
The rest can be better done in software.
The RISC/370
This is your authors name for a
hardware / software architecture developed by David A. Patterson [R104]. This experiment focused on the IBM S/360 and
S/370 as targets for a
RISC compiler. One model of interest was
the S/360 model 44. The S/360 model 44
implements only a subset of the S/360 architecture in hardware; the rest of the
functions are implemented in software.
This allows for a simpler and cheaper control unit. The Model 44 was marketed as a low–end S/360,
less powerful and less costly.
A compiler created for the RISC computer
IBM 801 was adapted to emit code for the S/370 treated as a register–to–register
machine, in the style of a RISC computer.
Only a subset of the S/370 instructions was used as a target for the
compiler. Specifically, the type RX
(memory and register) arithmetic instructions were omitted, as were the packed
decimal instructions, all of which are designed to be memory to memory with no
explicit register use.
This subset ran programs 50 percent
faster than the previous best optimizing compiler that used the full S/370
instruction set. Possibly the S/370 was
an overly complex design.
RISC vs. CISC: Final Comments
We give
the final word on the RISC versus CISC controversy to William Stallings [R06],
who ends his chapter on Reduced Instruction Set Computers with these comments.
“The
work that has been done on assessing the merits of the RISC approach can be
grouped into two categories. Quantitative: Attempts to compare
program size and execution speed of programs on RISC and CISC machines that use
comparable technology. Qualitative: Examines issues such as
high–level language support and optimum use of VLSI real estate.”
“Most
of the work on quantitative assessments has been done by those working on RISC
systems … and it has been, by and large, favorable to the RISC approach.”
“There are
several problems with attempting such comparisons.
1. There
is no pair of RISC and CISC machines that are comparable in life–
cycle cost, level of technology,
gate complexity, sophistication of
compiler, operating system
support, and so on.
2. No
definitive test set of programs exists.
Performance varies with the
program.
3. It
is difficult to sort out hardware effects from effects due to skill in
compiler writing.
4. Most
of the comparative analysis of RISC has been done on toy machines
rather than commercial
products. Moreover, most commercially
available
machines advertised as RISC
possess a mixture of RISC and CISC
characteristics. Thus, a fair comparison with a commercial
‘pure play’
CISC machine (e.g., VAX, Pentium)
is difficult.” [R06]