The Cray–1,
delivered in 1976, was the first of the Cray line of supercomputers, and the
first true vector processor. It was an
immediate hit among scientists who needed considerable computational power,
mostly because the vector facilities seemed a perfect match to the array–heavy
computation that was the life work of these scientists. Below is a figure of the Cray–1 at the
Deutsches Museum in Munich Germany.

Figure: The
Cray–1 at the Deutsches Museum in Munich Germany
Note the design. The low parts contained the power supplies
for the computer proper, which was housed in the taller parts. In 1976, the magazine Computerworld called
the Cray–1
“the world’s most expensive love seat”.
History of
In order to
understand the Cray line of computers, we must look at the personal history of
Seymour Cray, the “father of the supercomputer”. Cray began work at Control Data Corporation
soon after its founding in 1960 and remained there until 1972. He designed several computers, including the
CDC 1604, CDC 6600, and CDC 7600. The
CDC 1604 was intended just to be a good computer; all computers beginning with
the CDC 6600 were designed for speed. The
CDC 6600 is often called the first RISC (Reduced Instruction Set Computer), due
to the simplicity of its instruction set.
The reason for its simplicity was the desire for speed. Cray also put a lot of effort into matching
the memory and I/O speed with the CPU speed.
As he later noted, “Anyone can build a fast CPU. The trick is to build a fast system.” Full
disclosure: Your author has programmed on the CDC 6600, CDC 7600, and
Cray–1; he found each to be excellent machines with very clean architectures.
The CDC 6600
lead to the more successful CDC 7600. The CDC 8600 was to be a follow–on to the CDC
7600. While an excellent design, it
proved too complex to manufacture successfully, and was abandoned. Cray left Control Data Corporation in 1972 to
found Cray Research, based in Chippewa Falls, Wisconsin. The main reason for his departure was the
fact that CDC could not bankroll his project leading to development of the Cray–1. The parting was cordial; CDC did invest some
money in Cray’s new company.
In
1989, Cray left Cray Research in order to found Cray Computers, Inc. His reason for leaving was that he wanted to
spend more time on research, rather than just churning out the very profitable
computers that his previous company was manufacturing. This lead to an interesting name game:
Cray Research, Inc. producing a large number of commercial
computers
Cray Computer, Inc. mostly invested in research on future
machines.
The Cray–3, a
16–processor system, was announced in 1993 but never delivered. The
Cray–4, a smaller version of the Cray–3 with a 1 GHz clock was ended when the Cray
Computer Corporation went bankrupt in 1995.
Seymour Cray died on October 5, 1996.
In 1993, Cray
Research moved away from pure vector processors, producing its first massively
parallel processing (MPP) system, the Cray T3D™. We shall discuss this decision a bit later,
in another chapter of this book, when we discuss the rise of MPPs. Cray Research merged with SGI (Silicon
Graphics, Inc.) in February 1996. It was
spun off as a separate business unit in August 1999. In March 2000, Cray
Research was merged with Terra Computer Company to form Cray, Inc. The company still exists and has a very nice
web site (www.cray.com).
Here is a
schematic of the Cray–1. At the base, it
is more than 8 feet in diameter.
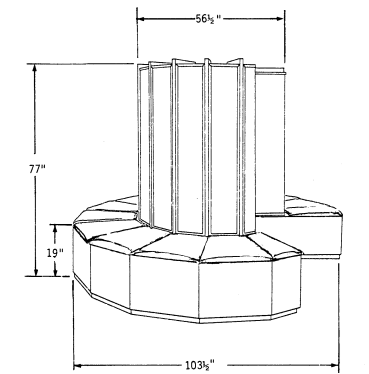
We may think
this a large computer, but for its time the Cray–1 was surprisingly small. Your author recalls the first time he
actually saw a Cray–1. The first thought
was “Is this all there is?” Admittedly,
there were a number of other units associated with this, including disk farms,
tape drives, and a variety of other I/O devices. As your author recalls, there was a dedicated
Front End Processor, possibly a CDC–7600, to manage the tapes and disks. The division of work load
into computational and I/O has a long history, for the reason it works.
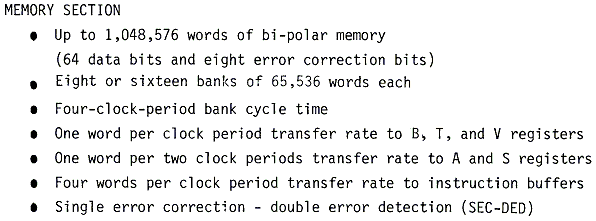
Processor Specifications of the Cray–1
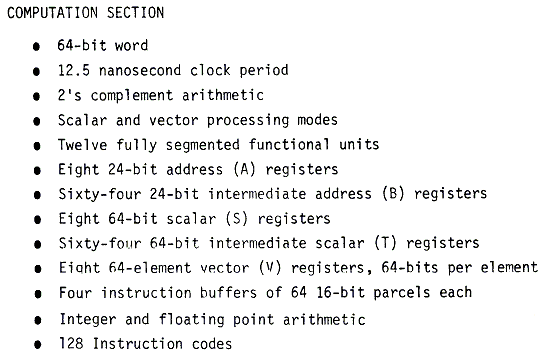
Source: Cray–1 Computer System Hardware Reference
Manual
Publication
2240004, Revision C, November, 1977 [R106].
Note that the
memory size, without error correction, would be 8MB. Each word has 64 data bits (8 bytes) as well
as 8 bits for error correction. Other
material indicates that the memory was low–order interleaved.
Here is a
considerable surprise. We are discussing
what was agreed to be the most powerful computer of the late 1970’s. Yet it had only eight megabytes of memory. The reader is invited to revisit this
textbook’s chapter on memory and note the price of memory in 1976.
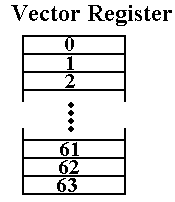
The Cray–1 Vector Registers
It is important
to understand the structure and function of the vector registers, as it is this
set of structures that made the computer a vector processor. Each of the vector registers is a vector of
registers, best viewed as a collection of sixty–four registers each holding 64
bits. A vector register held 4,096 bits. Vector registers are loaded from primary
memory and store results back to primary memory. One common use would be to load a vector
register from sixty–four consecutive memory words. Nonconsecutive words could
be handled if they appeared in a regular pattern, such as every other word or
every fourth word, etc.
One might
consider each register as an array, but that does not reflect its use. One of
the key design features of the Cray is the placement of a large number of
registers
between the memory and the CPU units.
These function much as cache memory.
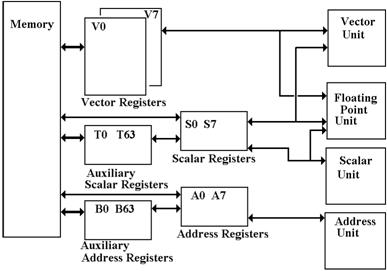
Note that the
scalar and address registers also have auxiliary registers.
In some sense,
we can say that the T registers function as a cache for the S registers, and the
B registers function as a cache for the A registers. Without the register storage provided by the
B, T, and V registers, the CRAY–1’s [memory] bandwidth of only 80 million words
per second would be a serious impediment to performance. Each word is 8 bytes; 80 million words per
second is 640 million bytes per second, or one byte every 1.6 nanoseconds.
Advantages of Vector Processors
Note that many
of the advantages of a vector processor depend on the structure of the problem
for which the program has been written.
“Advantages of vector computers
over traditional SISD processors include the following:
1. Each result is independent of
previous results, which enables deep pipelines and high clock rates without
generating any data hazards.
2. A single vector instruction
performs a great deal of work, which means fewer instruction fetches in
general, and fewer branch instructions and so fewer mispredicted
branches.
3. Vector instructions access
memory a block at a time, which allows memory latency to be amortized over, say, 64 elements.
4. Vector instructions access
memory with known patterns, which allows multiple memory banks to
simultaneously supply operands.
These last two
advantages mean that vector processors do not need to rely on high hit rates of
data caches to have high performance. They tend to rely on low-latency main
memory, often made from SRAM, and have as many as 1024 memory banks to get high
memory bandwidth.” [R80]
Amount of Work
Note that the
single vector instruction can correspond to the execution of 64 scalar
instructions in a normal SISD architecture.
This makes very good use of the bandwidth to the Instruction Cache that
fronts the memory. One instruction is
fetched and does the work of sixty four, with 63 fewer instruction fetches. Remember that the goal is to make the best
use of primary memory, which is inherently much slower than the CPU execution
units.
Locality of Memory Access
All vector
instructions accessing memory have a predictable access pattern. This pattern provides a good match for an
interleaved primary memory, of the type we discussed in a previous lecture on
matching the cache and main memory. Consider
a vector with 64 entries, each a 64–bit double word. The vector has size of 512 bytes. Given a heavily interleaved memory (1024–way
is not uncommon) the cost to access the first byte to be transferred is
amortized over the entire vector. If it
takes 80 nanoseconds to retrieve the first byte and 4 nanoseconds each to
retrieve the remaining 511, the average access time is
(80 + 4·511)/512 =
2124/512 = 4.15 ns.
Control Hazards
Most of the
control hazards in a scalar unit have to do with conditional branches, such as
taken at the end of a loop. Many of
these loops are now represented as a single vector instruction, which obviously
has no branch hazard.
The only branch
hazards in a vector pipeline occur due to conditional branches, such as the IF
… THEN … ELSE tests.
Evolution of the Cray–1
In this course,
the main significance of the CDC 6600 and CDC 7600 computers lies in their
influence on the design of the Cray–1 and other computers in the series. Remember that Seymour Cray was the principle
designer of all three computers.
Here is a comparison of the CDC 7600 and the Cray–1.
Item CDC 7600 Cray–1
Circuit
Elements Discrete
Components Integrated Circuitry
Memory Magnetic Core Semiconductor (50 nanoseconds)
Scalar
(word) size 60 bits 64 bits (plus 8
ECC bits)
Vector
Registers None Eight, each
holding 64 scalars.
Scalar
Registers Eight: X0
– X7 Eight: S0 – S7
Scalar
Buffer Registers None Sixty–four T0 –
T77
Octal
numbering was used.
Address
Registers Eight: A0 – A7 Eight: A0 – A7
Address
Buffer Registers None Sixty–four: B0
– B77
Two main changes: 1.
Addition of the eight vector registers.
2.
Addition of fast buffer registers for the A and S registers.
Chaining in the Cray–1
Here is how the
technique is described in the 1978 article [R107].
“Through a
technique called ‘chaining’, the CRAY–1 vector functional units, in combination
with scalar and vector registers, generate interim results and use them again
immediately without additional memory references, which slow down the computational
process in other contemporary computer systems.”
This is exactly
the technique, called “forwarding”,
used to handle data hazards in a pipelined control unit. Essentially a result to be written to a
register is made available to computational units in the CPU before it is
stored back into the register file.
Consider the
following example using the vector multiply and vector addition operators.
MULTV V1, V2, V3 //
V1[K] = V2[K] · V3[K]
ADDV V4,
V1, V5 // V4[K]
= V1[K] + V5[K]
Without chaining
(forwarding), the vector multiplication operation would have to finish before
the vector addition could begin.
Chaining allows a vector operation to start as soon as the individual
elements of its vector source become available.
The only restriction is that operations being chained belong to distinct
functional units, as each functional unit can do only one thing at a time.
Vector Startup Times
Vector
processing involves two basic steps: startup of the vector unit and pipelined
operation. As in other pipelined
designs, the maximum rate at which the vector unit executes instructions is
called the “Initiation Rate”, the
rate at which new vector operations are initiated when the vector unit is
running at “full speed”.
The initiation
rate is often expressed as a time, so that a vector unit that operated at
100 million operations per second would have an initiation rate of 10
nanoseconds. The time to process a
vector depends on the length of the vector.
For a vector with length N (containing N elements) we have
T(N)
= Start–Up_Time + N·Initiation_Rate
The time per
result is then T = (Start–Up Time) / N + Initiation_Rate. For short vectors (small values
of N), this time may exceed the initiation rate of the scalar execution unit. An important measure of the balance of the
design is the vector size at which the vector unit can process faster than the
scalar unit. For a Cray–1, this
crossover size was between 2 and 4;
2 £ N £ 4. For N > 4, the vector unit was always
faster.
Here are some
comparative data for mathematical operations (Log, cosine, square root, and
exponential), showing the per–result times as a function of vector length. Note the low crossover point, for vectors
larger than N = 5, the vector unit is much faster.
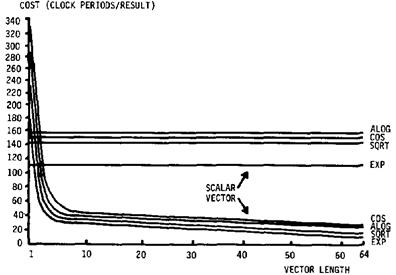
The time cost is
given in clock ticks, not nanoseconds.
See Russell, 1978 [R107].
The
Cooling Issue
The CRAY–1
computer weighed 5.25 tons (10,500 pounds or 4773 kilograms). It consumed 130
kilowatts of power. All that power
emerged as heat. The problem was keeping
the computer cool enough to operate. The
goal was not to keep the semiconductor circuitry from melting, but to keep it
from rising to the temperature at which thermal noise made it inoperable. Thermal noise refers to the fact that all
semiconductors generate electric signals as a result of their temperature. The maximum voltage of the signals due to
thermal noise increase as the temperature increases; for reasonable
temperatures they are so much smaller than the voltages intentionally generated
that they can be ignored.
The CRAY–1 and
its derivative computers (CRAY X–MP and CRAY Y–MP, etc.) employed a cold plate
approach to cooling. All circuit
elements were mounted on a ground plane (used to assert zero volts) that was a
copper sheet also used to cool the circuit.
The copper sheet was attached to an aluminum cold bar, maintained at 25
Celsius by a Freon refrigerant flowing through stainless steel tubes.
It is worth note
that it took a year and a half before the first good cold bar was built. A major problem was the discovery that
Aluminum is porous. The difficulty was
not due to loss of Freon, but due to the oil that contaminated the Freon; it
could damage the circuits.
The Cray X–MP and Cray Y–MP
The fundamental
tension at Cray Research, Inc. was between Seymour Cray’s desire to develop new
and more powerful computers and the need to keep the cash flow going. Seymour Cray realized the need for a cash
flow at the start. As a result, he
decided not to pursue his ideas based on the CDC 8600 design and chose to
develop a less aggressive machine. The
result was the Cray–1, which was still a remarkable machine.
With its cash
flow insured, the company then organized its efforts into two lines of work.
1. Research
and development on the CDC 8600 follow–on, to be called the Cray–2.
2. Production
of a line of computers that were derivatives of the Cray–1 with
improved technologies. These were called the X–MP, Y–MP, etc.
The X–MP was
introduced in 1982. It was a
dual–processor computer with a 9.5 nanosecond (105 MHz) clock and 16 to 128
megawords of static RAM main memory.
A four–processor model was introduced in 1984 with a
8.5 nanosecond clock.
The Y–MP was
introduced in 1988, with up to eight processors that used VLSI chips.
It had a 32–bit address space, with up to 64 megawords of static RAM main
memory.
The Y–MP M90,
introduced in 1992, was a large–memory variant of the Y–MP that replaced the
static RAM memory with up to 4 gigawords of DRAM.
The Cray–2
While his
assistant, Steve Chen, oversaw the production of the commercially successful
X–MP and Y–MP series, Seymour Cray pursued his development of the Cray–2, a
design based on the CDC 8600, which Cray had started while at the Control Data
Corporation. The original intent was to
build the VLSI chips from gallium arsenide (GaAs),
which would allow must faster circuitry.
The technology for manufacturing GaAs chips
was not then mature enough to be useful as circuit elements in a large
computer.
The Cray–2 was a
four–processor computer that had 64 to 512 megawords of 128–way interleaved
DRAM memory. The computer was built very
small in order to be very fast, as a result the circuit boards were built as
very compact stacked cards. Note the
hand holding the stacked circuitry in the figure below.

Due to the card
density, it was not possible to use air cooling. The entire system was immersed in a tank of
Fluorinert™, an inert liquid intended to be a blood substitute. When introduced in 1985, the Cray–2 was not
significantly faster than the Y–MP. It
sold only thirty copies, all to customers needing its large main memory
capacity.
Whatever Happened to Gallium Arsenide?
In his 1981 paper
on the CRAY–1, J. S. Kolodzev listed the advantages
of Gallium Arsenide as a semiconductor material and hinted that future Cray
computers would use circuits fabricated from the material. Whatever happened?
It is true that
the one and only CRAY–3 was build with GaAs
circuits. This was shortly before the
Cray Computer Company went bankrupt.
The advantages
of Gallium Arsenide are seen in the following table of switching times.
|
Material |
Switching Speed |
Relative to Silicon |
|
Silicon |
400 picoseconds |
1 |
|
Gallium Arsenide |
80 picoseconds |
5 times faster |
|
Josephson Junction |
15 picoseconds |
27 times faster |
The clear winner is the Josephson junction. The difficulty is that it only operates at
superconducting temperatures, which at the time were 4 Kelvins (– 452 F), the
temperature of liquid Helium. The
discovery of high–temperature superconducting in the late 1980’s may push this
up to 77 Kelvins (– 321 F), the temperature of liquid Nitrogen.
Operation of any circuitry at 4 Kelvins requires use
of liquid Helium, which is expensive.
Operation at 77 Kelvins requires use of liquid Nitrogen, which is
plentiful and cheap. Nevertheless, most
computer operators do not want to bother with it. This option is out.
Why not Gallium Arsenide?
Why not Gallium
Arsenide? It was hard to fabricate and,
unlike Silicon, did not form a stable oxide that could be used as an
insulator. This made Silicon the
preferred choice for the new high–speed circuit technology, called CMOS, which
was increasingly used in the late 1980’s and 1990’s. The economy of scale available to the Silicon
industry also played a large role in inhibiting the adoption of Gallium
Arsenide. This is another example of the
mass market products that are good enough for the job freezing out the low
market, high technology, products that theoretically are better.
The Cray–3 and the End of an Era
After the
Cray–2, Seymour Cray began another very aggressive design: the Cray–3. This was to be a very small computer that fit
into a cube one foot on a side. Such a
design would require retention of the Fluorinert cooling system. It would also be difficult to manufacture as
it would require robotic assembly and precision welding. It would also have been very difficult to
test, as there was no direct access to the internal parts of the machine.
The Cray–3 had a
2 nanosecond cycle time (500 MHz). A
single processor machine would have a performance of 948 megaflops; the
16–processor model would have operated at 15.2 gigaflops. The 16–unit model was never built. The Cray–3 was delivered in 1993. In 1994, Cray Research, Inc. released the T90
with a 2.2 nanosecond clock time and eight times the performance of the Cray–3.
In
the end, the development of traditional supercomputers ran into several
problems.
1. The
end of the cold war reduced the pressing need for massive computing facilities.
2. The
rise of microprocessor technology allowing much faster and cheaper processors.
3. The
rise of VLSI technology, making multiple processor systems more feasible.
Supercomputers vs. Multiprocessor
Clusters
“If you were plowing a field, which would you rather
use: Two
strong oxen or 1024 chickens?”
Although Seymour
Cray said it more colorfully, there were many objections to the transition from
the traditional vector supercomputer (with a few processors) to the massively
parallel computing that replaced it.
Here we quote from an overview article written in 1984 [R108]. It assessed the commercial viability of
traditional vector processors and multiprocessor systems. The key issue in assessing the commercial
viability of a multiple–processor system is the speedup factor; how much faster is a processor with N
processors. Here are two opinions from
the 1984 IEEE tutorial on supercomputers [R108].
“The speedup
factor of using an n–processor system
over a uniprocessor system has been theoretically estimated to be within the
range (log2n, n/log2n). For example, the speedup
range is less than 6.9 for n =
16. Most of today’s commercial
multiprocessors have only 2 to 4 processors in a system.”
“By the late
1980s, we may expect systems of 8–16 processors. Unless the technology changes drastically, we
will not anticipate massive multiprocessor systems until the 90s.”
As we shall see
soon, technology has changed drastically.