Sequential
Circuits
Sequential circuits are those with memory, also called “feedback”. In this, they differ
from combinational circuits, which have no memory.
The
stable output of a combinational circuit does not depend on the order in which
its
inputs are changed. The stable output of a sequential circuit
usually does depend
on the order in which the inputs
are changed.
Sequential
circuits can be used as memory elements; binary values can be stored in them.
The binary value stored in a circuit element is often called that element’s state.
All
sequential circuits depend on a phenomenon called gate delay. This reflects
the fact
that the output of any logic gate
(implementing a Boolean function) does not change
immediately when the input
changes, but only some time later.
The
gate delay for modern circuits is typically a few nanoseconds.
Synchronous
Sequential Circuits
We
usually focus on clocked sequential
circuits,
also called synchronous sequential circuits.
As
the name “synchronous” implies, these
circuits respond to a system clock,
which is used to synchronize the state changes of the various sequential
circuits.
One
textbook claims that “synchronous sequential circuits use clocks to order
events.” A better claim might be that
the clock is used to coordinate events.
Events that should happen at the same time do; events that should happen
later do happen later.
The
system clock is a circuit that emits
a sequence of regular pulses with a fixed and reliable pulse rate. If you have an electronic watch (who
doesn’t?), what you have is a small electronic circuit emitting pulses and a
counter circuit to count them.
Clock
frequencies are measured in
kilohertz thousands of ticks per second
megahertz millions of ticks per second
gigahertz billions of ticks per second.
One can design asynchronous sequential circuits, which
are not controlled by a system clock.
They present significant design challenges related to timing issues.
Views of the
System Clock
There
are a number of ways to view the system clock.
In general, the view depends on the detail that we need in discussing
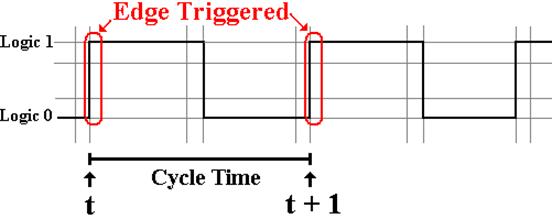
the problem. The logical view is shown
in the next figure, which illustrates some of the terms commonly used for a
clock.
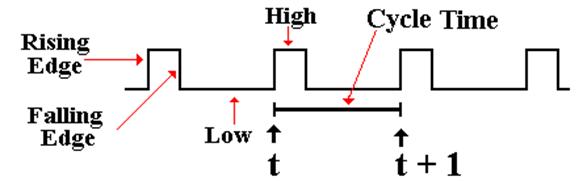
The
clock is typical of a periodic function. There is a period t for which
f(t) = f(t + t)
This
clock is asymmetric. It is often the case that the clock is symmetric, where the time spent at the
high level is the same as that at the low level. Your instructor often draws the clock as
asymmetric, just to show that such a design is allowed.
NOTATION: We
always call the present clock tick “t” and the
next one “t + 1”, even if it occurs
only two nanoseconds later.
Views of the
System Clock
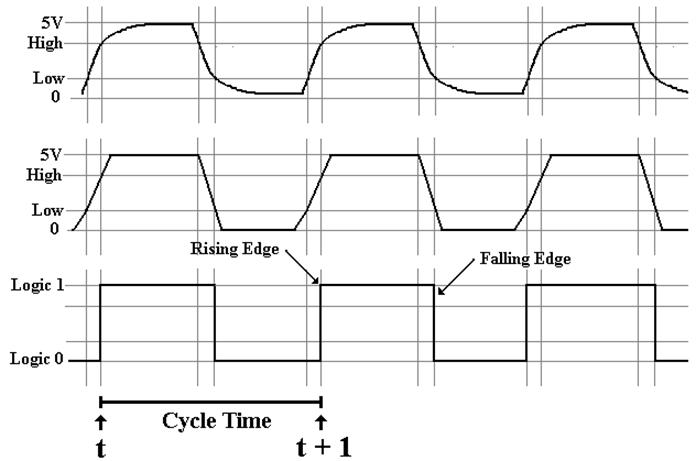
The top view is the “real
physical view”. It is seldom used.
The middle view reflects the fact that voltage levels do not change
instantaneously.
We use this view when considering
system busses.
Clock Period
and Frequency
If
the clock period is denoted by t, then the frequency (by
definition) is f = 1 / t.
For
example, if t = 2.0 nanoseconds, also written as t = 2.0·10–9 seconds, then
f = 1 / (2.0·10–9 seconds) = 0.50·109 seconds–1 or 500 megahertz.
If
f = 2.5 Gigahertz, also written as
2.5·109 seconds–1,
then
t = 1.0 / (2.5·109 seconds–1) = 0.4·10–9 seconds = 0.4 nanosecond.
Latches and
Flip–Flops: First Definition
We
consider a latch or a flip–flop as a device that stores a single binary value.
Flip–flops
and clocked latches are devices that accept input at fixed times dictated by
the system clock. For this reason they
are called “synchronous sequential
circuits”.
Denote
the present time by the symbol t. Denote the clock period by t.
Rather
than directly discussing the clock period, we merely say that
the current time is t
after the next clock tick the time
is (t + 1)
The
present state of the device is often called Q(t)
The next state of the device is often called Q(t
+ 1)
The
sequence: the present state is Q(t), the
clock “ticks”, the state is now Q(t + 1)
AGAIN: We call the next state
Q(t + 1), even if the transition from Q(t) to
Q(t + 1) takes only a few nanoseconds. We are counting the actual
number of clock
ticks, not the amount of time they take.
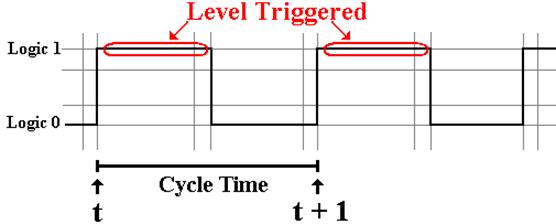
Latches and
Flip–Flops: When Triggered
Clocked
latches accept input when the system clock is at logic high.
Flip–flops
accept input on either the rising edge of the system clock.
Advantages
of Flip–Flops
When
either a flip–flop or a latch is used as a part of a circuit, we have the
problem of feedback. In this, the output of the device is processed
and then used as input.
Example:
The flip–flop is a part of a register that is to be incremented.
We
define the data path for the
computer as following the output of the flip–flop through the processing
elements and back to the input of the flip–flop.
The
data path time is the amount of time
that it takes the data to travel the data path.
If
this time is too short, the processed output of the flip–flop can get back to
its input during the time when the flip–flop remains sensitive to its input.
A
flip–flop is a latch that has been
modified to minimize the time during which the device responds to its input.
This
minimizes the possibility of uncontrolled feedback as associated instabilities.
In
this course, we shall ignore latches and focus only on flip–flops.
Describing
Flip–Flops
A
flip–flop is a “bit bucket”; it
holds a single binary bit.
A
flip–flop is characterized by its current state: Q(t).
We
want a way to describe the operation of the flip–flops.
How
do these devices respond to the input? We use tables to describe the operation.
Characteristic tables: Given
Q(t), the present state of the flip–flop, and
the
input, what will Q(t + 1), the
next state of the flip–flop, be?
Excitation tables: Given
Q(t), the present state of the flip–flop, and
Q(t + 1), the desired next state of the flip–flop,
what
input is required to achieve that change.
Functional
Definition of Flip–Flops
We
use the characteristic table to
describe both latches and flip–flops.
The
characteristic table takes the present state and input and shows the next
state.
Here
is the characteristic table for an SR flip–flop.
|
S |
R |
Present
State |
Next State |
|
0 |
0 |
0 |
0 |
|
0 |
0 |
1 |
1 |
|
0 |
1 |
0 |
0 |
|
0 |
1 |
1 |
0 |
|
1 |
0 |
0 |
1 |
|
1 |
0 |
1 |
1 |
|
1 |
1 |
0 |
ERROR |
|
1 |
1 |
1 |
ERROR |
Characteristic
Tables
We
often take a table such as
|
S |
R |
Present
State |
Next State |
|
0 |
0 |
0 |
0 |
|
0 |
0 |
1 |
1 |
|
0 |
1 |
0 |
0 |
|
0 |
1 |
1 |
0 |
|
1 |
0 |
0 |
1 |
|
1 |
0 |
1 |
1 |
|
1 |
1 |
0 |
ERROR |
|
1 |
1 |
1 |
ERROR |
And abbreviate it as
|
S |
R |
Q(t + 1) = Next
State |
|
0 |
0 |
Q(t) |
|
0 |
1 |
0 |
|
1 |
0 |
1 |
|
1 |
1 |
ERROR |
Comment on
Notation Used
All
flip–flops have a number of inputs that your instructor does not indicate
unless they are required for discussion of the circuit.
Power every flip–flop
must be powered
Ground every flip–flop must
be grounded
Clock all flip–flops are
clocked devices
Asynchronous
Clear this allows the flip–flop to
be cleared independently of the
clock. In other words, make Q(t) = 0.
Asynchronous
Set this allows the flip–flop to
be set independently of the
clock. In other words, make Q(t) = 1.
Absent
the explicit clock input, your instructor’s circuits might resemble unclocked
latches. Your instructor does not use
such latches, but designs only with flip–flops.
SR Flip–Flop
We
now adopt a functional view. How does
the next state depend on the present state and input. A flip–flop is a “bit holder”.
Here
is the diagram for the SR flip–flop.
Here again is the state
table for the SR flip–flop.
|
S |
R |
Q(t + 1) |
|
0 |
0 |
Q(T) |
|
0 |
1 |
0 |
|
1 |
0 |
1 |
|
1 |
1 |
ERROR |
Note that setting both S = 1
and R = 1 causes the flip–flop to enter a logically inconsistent state,
followed by an indeterministic, almost random, state. For this reason, we label the output for S =
1 and R = 1 as an error.
We Need
Another Flip–Flop
Consider
the characteristic table for the SR flip–flop.
It
is the same as that for the SR latch, except for the explicit reference to the
clock.
|
S |
R |
Q(t + 1) |
|
0 |
0 |
Q(t) |
|
0 |
1 |
0 |
|
1 |
0 |
1 |
|
1 |
1 |
ERROR |
Were we to modify the SR
flip–flop, what could be placed in the last row?
It
is easy to see that there are only four Boolean functions of a single Boolean
variable Q.
F(Q) = 0, F(Q) = Q, F(Q) = ![]() , and F(Q) = 1. The
above table is missing
, and F(Q) = 1. The
above table is missing ![]() .
.
This
gives rise to the JK, the most general of the flip–flops. Its characteristic table is:
|
J |
K |
Q(t + 1) |
|
0 |
0 |
Q(t) |
|
0 |
1 |
0 |
|
1 |
0 |
1 |
|
1 |
1 |
|
JK Flip–Flop
A
JK flip–flop generalizes the SR to allow for both inputs to be 1.
Here is the
characteristic table for a JK flip–flop.
|
J |
K |
Q(t + 1) |
|
0 |
0 |
Q(t) |
|
0 |
1 |
0 |
|
1 |
0 |
1 |
|
1 |
1 |
|
Note that the flip–flop can
generate all four possible functions of a single variable:
the two constants 0 and 1
the variables Q and ![]() .
.
The D
Flip–Flop
The
D flip–flop specializes either the SR or JK to store a single bit. It is very useful for interfacing the CPU to
external devices, where the CPU sends a brief pulse to set the value in the
device and it remains set until the next CPU signal.
The
characteristic table for the D flip–flop is so simple that it is expressed
better as the equation Q(t + 1) = D.
Here is the table.
|
D |
Q(t + 1) |
|
0 |
0 |
|
1 |
1 |
The T
Flip–Flop
The
“toggle” flip–flop allows one to change the value stored. It is often used in circuits in which the
value of the bit changes between 0 and 1, as in a modulo–4 counter in which the
low–order bit goes 0, 1, 0, 1, 0, 1, etc.
The characteristic table
for the D flip–flop is so simple that it is expressed better as the equation
Q(t + 1) = Q(t) Å T. Here is the table.
|
T |
Q(t + 1) |
|
0 |
Q(t) |
|
1 |
|
Here
the symbol “T” denotes the input; “t” and “t + 1” denote time.
The JK
Flip–Flop as a General–Use Flip–Flop
The
JK flip–flop can be used to implement any of the other three flip–flops.
As a D flip–flop
As a T flip–flop
As an SR flip–flop. Just never use J = 1 and K = 1
as simultaneous inputs.
Excitation
Table for an SR Flip–Flop
Here
again is the state table for the SR flip–flop.
|
S |
R |
Q(t + 1) |
|
0 |
0 |
Q(t) |
|
0 |
1 |
0 |
|
1 |
0 |
1 |
|
1 |
1 |
Error |
We
now derive the excitation table.
If
Q(t) = 0 and we want Q(t + 1) = 0, there are two choices:
S = 0 and R = 0 maintains the same
state, so Q(t + 1) = Q(t) = 0.
S = 0 and R = 1 forces Q(t + 1) =
0.
If S = 0, then the next state will be Q(t + 1) = 0 without regard to R. We say S = 0, R = d.
Here
is the Excitation Table for an SR Flip–Flop.
|
Q(t) |
Q(t + 1) |
S |
R |
|
0 |
0 |
0 |
d |
|
0 |
1 |
1 |
0 |
|
1 |
0 |
0 |
1 |
|
1 |
1 |
d |
0 |
JK Flip–Flop
A
JK flip–flop generalizes the SR to allow for both inputs to be 1.
Here is the characteristic
table for a JK flip–flop.
|
J |
K |
Q(t + 1) |
|
0 |
0 |
Q(t) |
|
0 |
1 |
0 |
|
1 |
0 |
1 |
|
1 |
1 |
|
Here
is the Excitation Table for a JK Flip–Flop.
|
Q(t) |
Q(t + 1) |
J |
K |
|
0 |
0 |
0 |
d |
|
0 |
1 |
1 |
d |
|
1 |
0 |
d |
1 |
|
1 |
1 |
d |
0 |