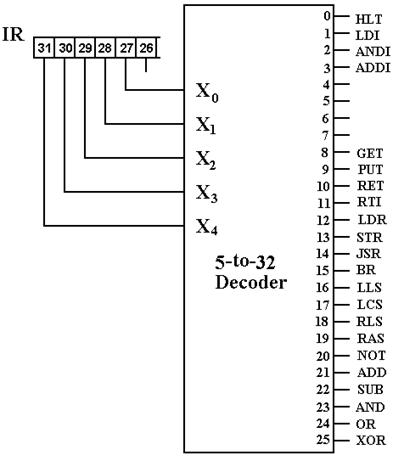
The
Instruction Decoder
The
instruction decoder, used by both the hardwired control unit and
microprogrammed control unit, is a simple 5–to–32 active high decoder with some
outputs not used.
The Signal
Generation Trees
The
hardwired control unit is implemented as a number of signal generation trees.
The
input to each tree is as follows:
1. The
discrete signal from the decoder indicating the instruction.
2. The
major state: F, D, or E.
3. The
minor state register: T0, T1, T2, or T3.
We
should be careful about discussing the discrete outputs of the Instruction
Decoder.
Each
of these is a Boolean discrete signal with only two values: 0 or 1.
Example:
The
JSR instruction has op-code = 14.
When
this op–code is in the IR, decoder output Y14 = 1. We say JSR = 1.
There
is a JSR instruction in the assembly language and a JSR discrete signal
in the microarchitecture that corresponds to the instruction, but is not
identical to it.
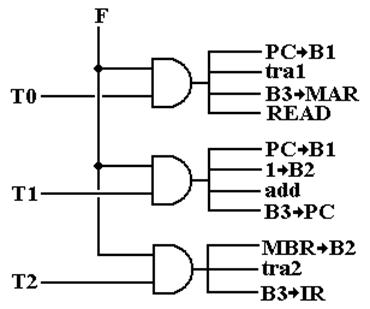
The Common
Fetch Sequence
Here
is the control signal sequence for the common fetch.
F, T0: PC ® B1, tra1, B3 ® MAR, READ. // MAR ¬ (PC)
F, T1: PC ® B1, 1 ® B2, add, B3 ® PC. //
PC ¬ (PC) + 1
F, T2: MBR ® B2, tra2, B3 ® IR. // IR ¬ (MBR)
Here is the signal generation
tree for the common fetch.
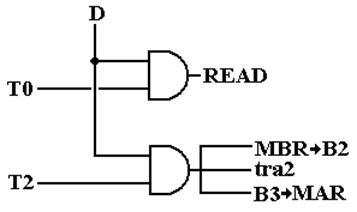
The Sequence
for the Defer State
Here
is the control signal sequence for the
D, T0: READ. //
Address is already in the MAR.
D, T1: WAIT. // Cannot access the MBR just now.
D, T2: MBR
® B2, tra2, B3 ® MAR. // MAR ¬ (MBR)
D, T3: WAIT. //
Effective Address is now in the MAR.
Here is the signal generation
tree.
Fetch, T3
We
summarize the actions in (F, T3) in order to generate signals.
|
Op–Code |
|
B1 |
B2 |
B3 |
ALU |
Other |
||||
|
IR31 |
IR30 |
IR29 |
IR28 |
IR27 |
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
0 |
HLT |
|
|
|
|
0 ® RUN |
|
0 |
0 |
0 |
0 |
1 |
LDI |
IR |
|
R |
tra1 |
|
|
0 |
0 |
0 |
1 |
0 |
ANDI |
IR |
R |
R |
and |
|
|
0 |
0 |
0 |
1 |
1 |
ADDI |
IR |
R |
R |
add |
|
|
0 |
1 |
0 |
0 |
0 |
GET |
|
|
|
|
|
|
0 |
1 |
0 |
0 |
1 |
PUT |
|
|
|
|
|
|
0 |
1 |
0 |
1 |
0 |
RET |
|
|
|
|
|
|
0 |
1 |
0 |
1 |
1 |
RTI |
|
|
|
|
|
|
0 |
1 |
1 |
0 |
0 |
LDR |
IR |
R |
MAR |
add |
|
|
0 |
1 |
1 |
0 |
1 |
STR |
IR |
R |
MAR |
add |
|
|
0 |
1 |
1 |
1 |
0 |
JSR |
IR |
R |
MAR |
add |
|
|
0 |
1 |
1 |
1 |
1 |
BR |
IR |
R |
MAR |
add |
|
|
1 |
0 |
0 |
0 |
0 |
LLS |
|
R |
R |
shift |
1, 0, 0* |
|
1 |
0 |
0 |
0 |
1 |
LCS |
|
R |
R |
shift |
1, 0, 1 |
|
1 |
0 |
0 |
1 |
0 |
RLS |
|
R |
R |
shift |
0, 0, 0 |
|
1 |
0 |
0 |
1 |
1 |
RAS |
|
R |
R |
shift |
0, 1, 0 |
|
1 |
0 |
1 |
0 |
0 |
NOT |
|
R |
R |
not |
|
|
1 |
0 |
1 |
0 |
1 |
ADD |
R |
R |
R |
add |
|
|
1 |
0 |
1 |
1 |
0 |
SUB |
R |
R |
R |
sub |
|
|
1 |
0 |
1 |
1 |
1 |
AND |
R |
R |
R |
and |
|
|
1 |
1 |
0 |
0 |
0 |
OR |
R |
R |
R |
or |
|
|
1 |
1 |
0 |
0 |
1 |
XOR |
R |
R |
R |
xor |
|
Commonalities
in Fetch, T3 (Part 1)
We
begin to note a few commonalities in the (F, T3) control signals
that will help to simplify the signal generation tree.
If
IR31 = 1, we have two distinct classes of instructions.
ADD, SUB, AND, OR, XOR
These dyadic instructions issue R ® B1, R ® B2, and B3 ® R.
These are issued in addition to
the control signal for the specific ALU operation.
LLS, LCS, RLS, RAS, NOT
These monadic instructions issue R ® B2, and B3 ® R.
These are issued in addition to
the control signal for the specific ALU operation.
Note that we could issue R ® B1 for these five monadic instructions as well.
This would likely put register %R0
on bus B1, but that bus would not be used.
SIMPLIFICATION
If IR31 = 1, the signal
generation tree will generate these signals in addition to
the control signal for the
specific ALU operation.
R ® B1, R ® B2, and B3 ® R
Commonalities
in Fetch, T3 (Part 2)
Here
we note the commonalities for instructions with IR31 = 0.
All
instructions that use bus B1 issue the control signal IR ® B1.
We
simplify the signal generation tree by causing
all instructions with IR31 = 0 to issue the signal IR ® B1.
All instructions that use bus
B2 issue the control signal R ® B2.
This holds true for both IR31 = 0 and IR31 = 1.
We just assert R ® B2 whenever the control unit is in (Fetch, T3).
All instructions with IR31
= 0, IR30 = 1, and IR29 = 1 issue the control signals
B3 ® MAR, add.
All instructions with IR31
= 0, IR30 = 0, and IR29 = 0 that use bus B3 issue the
control signal B3 ® R.
Signal
Generation Tree for (Fetch, T3)
Here it is. The handling of IR31 in the book
is not correct.
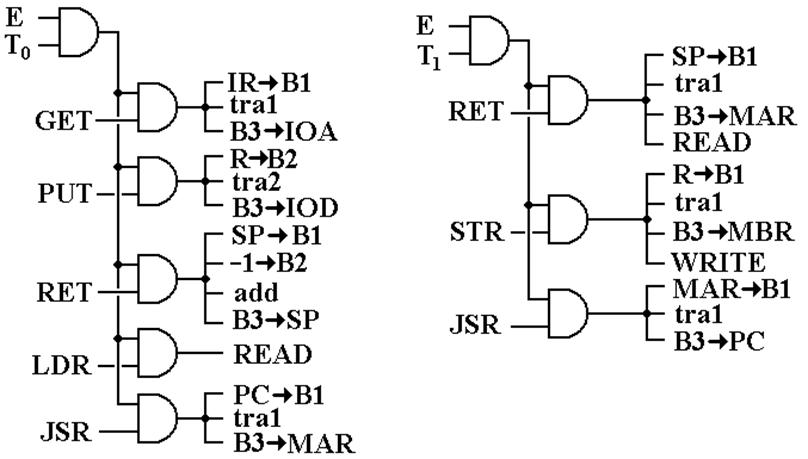
Study for
the Execute State (T0 and T1)
Here we compile all actions
taken during Execute and organize by
the
Execute, T0
GET: IR ® B1, tra1,
B3 ® IOA.
PUT: R ® B2, tra2,
B3 ® IOD
RET: SP ® B1, – 1 ® B2, add, B3 ® SP.
LDR: READ.
JSR: PC ® B1, tra1,
B3 ® MBR.
Execute, T1
RET: SP ® B1, tra1, B3 ® MAR, READ.
STR: R ® B1, tra1, B3 ® MBR, WRITE.
JSR: MAR ® B1, tra1,
B3 ® PC.
Study for
the Execute State (T2 and T3)
Execute, T2
GET: IOD ® B2, tra2,
B3 ® R.
PUT: IR ® B1, tra1,
B3 ® IOA.
LDR: MBR ® B2, tra2, B3 ® R.
JSR: SP ® B1, tra1,
B3 ® MAR, WRITE.
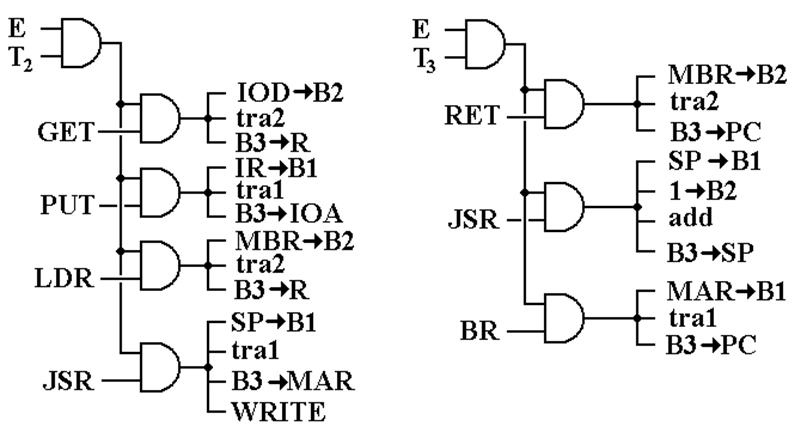
Execute, T3
RET: MBR ® B2, tra2,
B3 ® PC.
JSR: SP ® B1, 1 ® B2, add,
B3 ® SP.
BR: MAR ® B1, tra1, B3 ® PC.
Control
Signals for the Execute State (T0 and T1)
Control
Signals for the Execute State (T2 and T3)