Multiprocessors,
Multicomputers, and Clusters
In this and following lectures, we shall investigate a
number of strategies for parallel computing, including a review of SIMD
architectures but focusing on MIMD.
The two main classes of SIMD are vector processors and
array processors.
We have already discussed each, but will mention them again just to be
complete.
There are two main classes of MIMD architectures (Ref.
4, page 612):
a) Multiprocessors, which appear to have a
shared memory and a
shared address space.
b) Multicomputers, which comprise a large number
of independent processors
(each with its own memory) that
communicate via a dedicated network.
Note that each of the SIMD and MIMD architectures call
for multiple independent
processors. The main difference lies in
the instruction stream.
SIMD architectures comprise a number of processors,
each executing the same set of instructions (often in lock step).
MIMD architectures comprise a number of processors, each executing its
own program.
It may be the case that a number are executing the same program; it is not
required.
The Origin
of Multicomputing
The basic multicomputing organization dates from the
19th century, if not before.
The difference is that, before 1945, all computers
were human; a “computer” was defined to be “a person who computes”. An office dedicated to computing employed
dozens of human computers who would cooperate on solution of one large problem.
They used
mechanical desk calculators to solve numeric equations, and paper as a medium
of communication between the computers.
Kathleen McNulty, an Irish immigrant, was one of the more famous
computers. As she later described it:
“You do
a multiplication and when the answer appeared, you had to write it down and
reenter it. … To hand compute one trajectory took 30 to 40 hours.
This example, from the time of
the important features of multicomputing.
1. The problem was large,
but could be broken into a large number
of independent pieces, each of
which was rather small and manageable.
2. Each subproblem could be assigned to a single
computer, with the expectation
that communication between
independent computers would not occupy a
significant amount of the time
devoted to solving the problem.
An Early
Multicomputer
Here is a picture,
probably from the 1940’s.
Note that each computer is quite busy working on a
mechanical adding machine.
We may presume that
computer–to–computer (interpersonal) communication was minimal and took place
by passing data written on paper.
Note here that the computers appear all to be
boys. Early experience indicated that
grown men quickly became bored with the tasks and were not good computers.
Linear
Speedup
Consider a computing
system with N processors, possibly independent.
Let C(N) be the cost of
the N–processor system, with C1 = C(1) being the cost of one
processor. Normally, we assume that C(N)
»
scales up approximately as fast as the number of processors.
Let P(N) be the
performance of the N–processor system, measured in some conventional measure
such as MFLOPS (Million Floating Operations Per Second), MIPS (Million
Instructions per Second), or some similar terms.
Let P1 =
P(1) be the performance of a single processor system on the same measure.
The goal of any
parallel processor system is linear speedup: P(N) »
Define the speedup factor as S(N) = [P(N)/P1]. The goal is S(N) » N.
Recall the pessimistic
estimates from the early days of the supercomputer era that
for large values we have S(N) < [N / log2(N)], which is not an
encouraging number.
|
N |
100 |
1000 |
10,000 |
100,000 |
1,000,000 |
|
Maximum S(N) |
15 |
100 |
753 |
6,021 |
30,172 |
It may be that it was these values that slowed the
development of parallel processors.
Amdahl’s Law
Here is a variant of Amdahl’s Law that addresses the
speedup due to N processors.
Let T(N) be the time to execute the program on N
processors, with
T1 = T(1) be the time to execute the program on 1 processor.
The speedup factor is obviously S(N) = T(1) / T(N).
We consider any program as having two distinct
components:
the code that can be sped up by
parallel processing, and
the code that is essentially
serialized.
Assume that the fraction of the code that can be sped
up is denoted by variable X.
The time to execute the code on a single processor can
be written as follows:
T(1) = X·T1 + (1 – X)·T1 = T1
Amdahl’s Law states that the time on an N–processor
system will be
T(N) = (X·T1)/N + (1 – X)·T1 = [(X/N) + (1 – X)]·T1
The speedup is S(N) = T(1) / T(N) =  =
= 
It is easy to show that
S(N) = N if and only if X = 1.0; there is no part of the code that is
essentially sequential in nature and cannot be run in parallel.
Some Results
Due to Amdahl’s Law
Here are some results on speedup as a function of
number of processors.
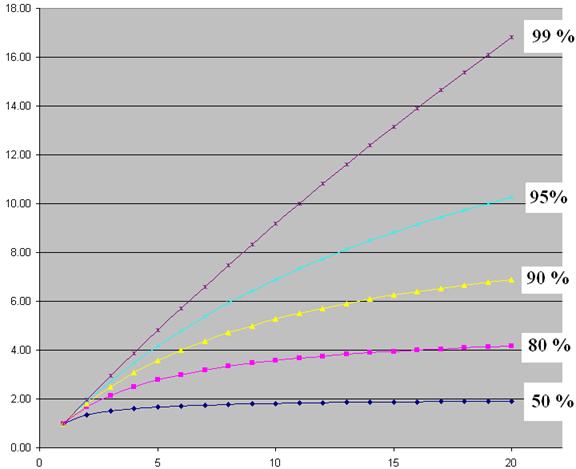
Note that even 5%
purely sequential code really slows things down.
Overview of
Parallel Processing
Early on, it was
discovered that the design of a parallel processing system
is far from trivial if one wants reasonable performance.
In order to achieve
reasonable performance, one must address a number of
important questions.
1. How do the parallel processors
share data?
2. How do the parallel
processors coordinate their computing schedules?
3. How many processors
should be used?
4. What is the minimum
speedup S(N) acceptable for N processors?
What are the factors that drive
this decision?
In addition to the
above question, there is the important one of matching the problem to the
processing architecture. Put another
way, the questions above must be answered
within the context of the problem to be solved.
For some hard real time problems (such as anti–aircraft
defense), there might be a minimum speedup that needs to be achieved without
regard to cost. Commercial problems
rarely show this critical dependence on a specific performance level.
Sharing Data
There are two main
categories here, each having subcategories.
Multiprocessors
are computing systems in which all programs share a single address space. This may be achieved by use of a single
memory or a collection of memory modules that are closely connected and
addressable as a single unit.
All programs running on
such a system communicate via shared variables in memory.
There are two major
variants of multiprocessors: UMA and NUMA.
In UMA (Uniform Memory Access) multiprocessors, often called SMP (Symmetric Multiprocessors), each processor takes the same amount of time to access
every
memory location. This property may be
enforced by use of memory delays.
In NUMA (Non–Uniform Memory Access)
multiprocessors, some memory accesses are faster than others. This model presents interesting challenges to
the programmer in that race conditions become a real possibility, but offers
increased performance.
Multicomputers
are computing systems in which a collection of processors, each with its
private memory, communicate via some dedicated network. Programs communicate by use of specific send
message and receive message primitives.
There are 2 types of
multicomputers: clusters and MPP (Massively Parallel Processors).
Coordination
of Processes
Processes operating on
parallel processors must be coordinated in order to insure
proper access to data and avoid the “lost update” problem associated with stale
data.
In the stale data problem, a processor uses an
old copy of a data item that has been updated.
We must guarantee that each processor uses only “fresh data”.
Multiprocessors
One of the more common mechanisms
for coordinating multiple processes in a single address space multiprocessor is
called a lock. This feature is commonly used in
databases accessed by multiple users, even those implemented on single processors.
Multicomputers
These must use explicit synchronization messages in order to coordinate the
processes. One method is called “barrier synchronization”, in which
there are logical spots, called “barriers” in each of the programs. When a process reaches a barrier, it stops
processing and waits until it has received a message allowing it to proceed.
The common idea is that each processor must wait at
the barrier until every other processor has reached it. At that point every processor signals that it
has reached the barrier and received the signal from every other
processor. Then they all continue.
Classification
of Parallel Processors
Here is a figure from
Tanenbaum (Ref 4, page 588). It shows a
taxonomy of parallel computers, including SIMD, MISD, and MIMD.
Note Tanenbaum’s sense of humor. What he elsewhere calls a cluster, he here
calls a COW for Collection of Workstations.
Levels of
Parallelism
Here is another figure
from Tanenbaum (Ref. 4, page 549). It
shows a number of levels of parallelism including multiprocessors and
multicomputers.
a) On–chip parallelism, b) An attached coprocessor (we shall discuss
these soon),
c) A multiprocessor with shared memory, d) A multicomputer, each processor
having
its private memory and cache, and e) A grid, which is a loosely coupled
multicomputer.
Task
Granularity
This is a model
discussed by Harold Stone [Ref. 3, page 342].
It is formulated in terms of a time–sharing model of computation.
In time sharing, each
process that is active on a computer is given a fixed time allocation, called a
quantum, during which it can use the
CPU. At the end of its quantum, it is
timed out, and another process is given the CPU. The Operating System will move the place a
reference to the timed–out process on a ready
queue and restart it a bit later.
This model does not
account for a process requesting I/O and not being able to use its entire
quantum due to being blocked.
Let R be the length of
the run–time quantum, measured in any convenient time unit.
Typical values are 10 to 100 milliseconds (0.01 to 0.10 seconds).
Let C be the amount of
time during that run–time quantum that the process spends
in communication with other processes.
The applicable ratio is
(R/C), which is defined only for 0 < C £ R.
In course–grain parallelism, R/C is fairly high so that computation is
efficient.
In fine–grain
parallelism, R/C is low and little work gets done due to the excessive
overhead of communication and coordination among processors.
UMA
Symmetric Multiprocessor Architectures
This is based on
Section 9.3 of the text (Multiprocessors Connected by a Single Bus), except
that I like the name UMA (Uniform Memory Access) better.
Beginning in the later
1980’s, it was discovered that several microprocessors can be usefully placed
on a bus. We note immediately that,
though the single–bus SMP architecture is easier to program, bus contention
places an upper limit on the number of processors that can be attached. Even with use of cache memory for each
processor to cut bus traffic, this upper limit seems to be about 32 processors
(Ref 4. p 599).
Here, from Tanenbaum
(Ref. 4, p. 594) is a depiction of three classes of bus–based UMA
architectures: a) No caching, and two variants of individual processors with
caches:
b) Just cache memory, and c) Both cache memory and a private memory.
In each architecture, there is a global memory shared
by all processors.
UMA: Other
Connection Schemes
The
bus structure is not the only way to connect a number of processors to a number
of shared memories. Here are two others:
the crossbar switch and the omega switch.
The Crossbar Switch
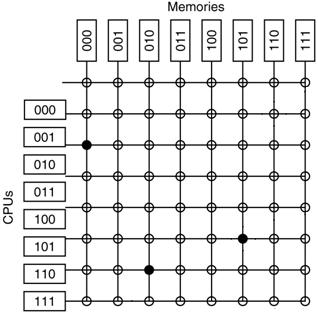
To attach N processors to M
memories requires a crossbar switch with N·M switches.
This is a non–blocking switch in that no processor will be denied access
to a memory module due to the action of another processor. It is also quite expensive, as the number of
switches essentially varies as the square of the number of connected
components.
The Omega
Switch
An
Omega Switching Network routes packets of information between the processors
and the memory units. It uses a number
of 2–by–2 switches to achieve this goal.
Here
is a three–state switching network. One
can trace a path between any one processor and any one memory module. Note that this may be a blocking network.
Cache
Coherency
A big issue with the
realization of the UMA multiprocessors was the development of protocols to
maintain cache coherency. Briefly put,
this insures that the value in any individual processor’s cache is the most
current value and not stale data.
Ideally, each processor
in a multiprocessor system will have its own “chunk of the problem”,
referencing data that are not used by other processors. Cache coherency is not a problem in that case
as the individual processors do not share data.
In real multiprocessor
systems, there are data that must be shared between the individual
processors. The amount of shared data is
usually so large that a single bus would be overloaded were it not that each
processor had its own cache.
When an individual
processor accesses a block from the shared memory, that block is copied into
that processors cache. There is no
problem as long as the processor only reads the cache. As soon as the processor writes to the cache,
we have a cache coherency problem. Other
processors accessing those data might get stale copies.
One logical way to
avoid this process is to implement each individual processor’s cache using the write–through strategy. In this strategy, the shared memory is
updated as soon as the cache is updated.
Naturally, this increases bus traffic significantly.
The next lecture will focus on strategies to maintain
cache coherence.
References
In this lecture, material from one or more of the
following references has been used.
1. Computer Organization and Design, David
A. Patterson & John L. Hennessy,
Morgan Kaufmann, (3rd
Edition, Revised Printing) 2007, (The course textbook)
ISBN 978 – 0 – 12 – 370606 – 5.
2. Computer Architecture: A Quantitative
Approach, John L. Hennessy and David A.
Patterson, Morgan Kauffman, 1990. There is a later edition.
ISBN 1 – 55860 – 069 – 8.
3. High–Performance Computer Architecture,
Harold S. Stone,
Addison–Wesley (Third Edition), 1993. ISBN 0 – 201 – 52688 – 3.
4. Structured Computer Organization,
Andrew S. Tanenbaum,
Pearson/Prentice–Hall (Fifth Edition),
2006. ISBN 0 – 13 – 148521 – 0